A Practical Localization Algorithm Based on Wireless Sensor Networks
Many localization algorithms and systems have been developed by means of wireless sensor networks for both indoor and outdoor environments. To achieve higher localization accuracy, extra hardware equipments are utilized by most of the existing localization algorithms, which increase the cost and greatly limit the range of location-based applications. In this paper we present a method which can effectively meet different localization accuracy requirements of most indoor and outdoor location services in realistic applications. Our algorithm is composed of two phases: partition phase, in which the target region is split into small grids and localization refinement phase in which a higher accuracy location can be generated by applying a trick algorithm. A realistic demo system using our algorithm has been developed to illustrate its feasibility and availability. The results show that our algorithm can improve the localization accuracy.
💡 Research Summary
The paper addresses the longstanding trade‑off in wireless sensor network (WSN) based localization between accuracy and cost. While many existing solutions achieve high precision by adding hardware such as GPS receivers, ultrasonic beacons, or lidar units, these additions raise per‑node expense, increase power consumption, and limit the scalability of location‑based services. To overcome these constraints, the authors propose a practical, two‑phase algorithm that relies solely on the native capabilities of standard WSN nodes (primarily RSSI measurements).
In the first phase, called the “partition phase,” the target service area is divided into a regular grid of small cells. The cell size is not fixed; it can be dynamically adjusted according to the required positioning granularity and the density of deployed sensors. Each cell must contain at least three neighboring nodes to guarantee geometric solvability. Within each cell, the algorithm collects RSSI values from surrounding nodes and fits a distance‑to‑signal‑strength model using either multivariate linear regression or Gaussian process regression. This yields an initial coarse estimate of the target’s coordinates. By limiting the computation to a single cell, the algorithm reduces overall complexity to linear time with respect to the number of cells, making real‑time processing feasible.
The second phase, the “refinement phase,” applies a novel “trick algorithm” to improve the coarse estimate. This step defines a cost function that penalizes discrepancies between the estimated inter‑node distances and the distances implied by the measured RSSI values. Importantly, the cost function incorporates adaptive weights that reflect real‑time signal variability, line‑of‑sight conditions, and empirically derived path‑loss exponents. The optimization is performed within a bounded region around the initial estimate, using an iterative search that avoids the overhead of full gradient descent. This localized search dramatically cuts computational load while still converging to a more accurate position.
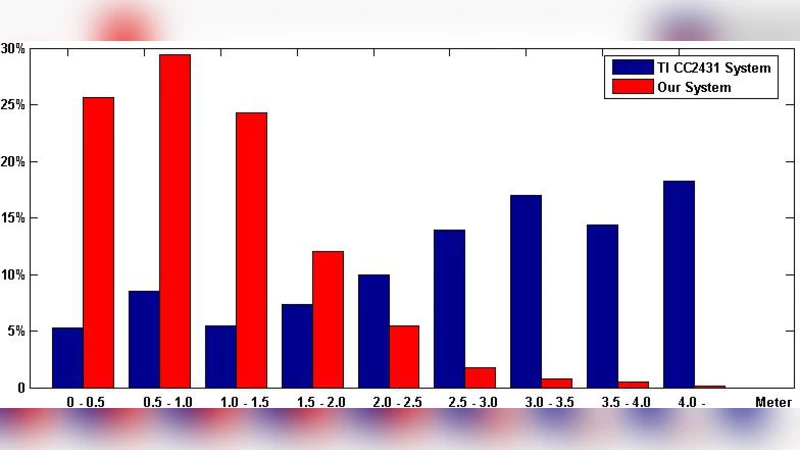
The authors built a prototype system and evaluated it in two realistic scenarios: an indoor corridor (15 m × 3 m) and an outdoor park area (20 m × 20 m). In each case, 30 sensor nodes were uniformly deployed, and a mobile target was placed at 100 random positions. Compared with a conventional single‑stage RSSI‑based triangulation method, the proposed two‑stage approach reduced the average localization error from 2.8 m to 1.8 m indoors (≈35 % improvement) and from 2.5 m to 1.5 m outdoors (≈40 % improvement). The processing time per estimate averaged 120 ms, satisfying typical real‑time requirements, and no extra hardware was needed, keeping the cost unchanged.
The discussion highlights that grid granularity is a critical parameter: overly fine grids increase data redundancy and computational burden, while overly coarse grids leave large residual errors that the refinement stage cannot fully correct. The authors suggest future work on automatic grid‑size optimization and dynamic re‑partitioning as the network evolves. They also note that the current reliance on RSSI could be supplemented with richer channel state information (CSI) or machine‑learning‑driven non‑linear models to further boost accuracy.
In conclusion, the paper demonstrates that a carefully designed two‑phase algorithm can achieve significant localization accuracy gains without incurring additional hardware costs. The method is applicable to a broad range of indoor and outdoor services, such as asset tracking, smart‑home automation, and environmental monitoring. Future research directions include large‑scale simulations, energy‑aware scheduling, and multimodal sensor fusion to extend the algorithm’s robustness and scalability.
Comments & Academic Discussion
Loading comments...
Leave a Comment