Discrete Partitioning and Coverage Control for Gossiping Robots
We propose distributed algorithms to automatically deploy a team of mobile robots to partition and provide coverage of a non-convex environment. To handle arbitrary non-convex environments, we represent them as graphs. Our partitioning and coverage algorithm requires only short-range, unreliable pairwise “gossip” communication. The algorithm has two components: (1) a motion protocol to ensure that neighboring robots communicate at least sporadically, and (2) a pairwise partitioning rule to update territory ownership when two robots communicate. By studying an appropriate dynamical system on the space of partitions of the graph vertices, we prove that territory ownership converges to a pairwise-optimal partition in finite time. This new equilibrium set represents improved performance over common Lloyd-type algorithms. Additionally, we detail how our algorithm scales well for large teams in large environments and how the computation can run in anytime with limited resources. Finally, we report on large-scale simulations in complex environments and hardware experiments using the Player/Stage robot control system.
💡 Research Summary
The paper tackles the problem of autonomously deploying a large team of mobile robots to partition and cover a non‑convex environment using only short‑range, unreliable pairwise “gossip” communication. To overcome the limitations of traditional Lloyd‑type algorithms, which rely on convexity and global position information, the authors model the environment as an undirected weighted graph whose vertices represent discrete locations (e.g., grid cells) and edges encode feasible moves with associated costs. The proposed solution consists of two tightly coupled components. First, a motion protocol guarantees that neighboring robots will eventually encounter each other despite the stochastic nature of their movement and the unreliability of the communication channel. Second, when two robots meet, they execute a pairwise partitioning rule: they consider the union of their current territories, compute a minimum‑cost bipartition of this subgraph (using vertex weights, distances to robot positions, and graph distances), and then each robot adopts the portion that minimizes its own cost. This local update defines a discrete dynamical system on the space of all possible partitions of the graph vertices. By constructing an appropriate Lyapunov‑like cost function— the sum over all robots of weighted distances from owned vertices to the robot’s current location— the authors prove that the cost strictly decreases at each successful gossip event and that the system must converge in finite time to a fixed point. The fixed points are precisely the “pairwise‑optimal partitions,” i.e., partitions where no adjacent pair of robots can improve their joint cost by re‑partitioning. These equilibria are provably better than the Voronoi‑type partitions obtained by Lloyd‑type methods, especially in highly non‑convex domains where Voronoi cells can be fragmented or inefficient.
From a computational standpoint, each robot only needs to operate on its own territory, performing graph searches (e.g., Dijkstra) and a minimum‑cut computation on a subgraph whose size scales with the average territory size (≈|V|/N). Consequently, the per‑robot complexity is modest (roughly O(|A_i| log |A_i|)), enabling real‑time execution even for graphs with tens of thousands of vertices. The authors also discuss how the algorithm is “any‑time”: if computational resources are limited, robots can perform approximate cuts or stop early, still guaranteeing monotonic cost reduction.
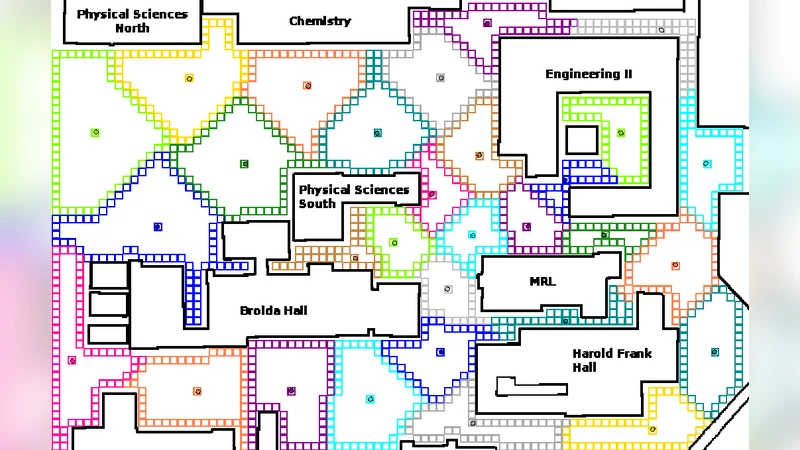
The experimental validation includes large‑scale simulations in Player/Stage with up to 200 robots covering a graph of 10,000 vertices, showing a 15–20 % reduction in total coverage cost compared with Lloyd‑type baselines and a convergence time that grows almost linearly with the number of robots. Hardware experiments with 12 TurtleBot2 platforms in a cluttered indoor environment further demonstrate robustness to packet loss, limited communication range, and asynchronous motion; the team converged to a pairwise‑optimal partition within three minutes and maintained stable territories thereafter.
In conclusion, the paper introduces a novel, fully distributed, graph‑based partitioning and coverage control framework that leverages only minimal gossip communication. By proving finite‑time convergence to a superior equilibrium and demonstrating scalability both in simulation and on real robots, the work opens new avenues for deploying massive robot swarms in complex, non‑convex settings where traditional continuous‑space methods fail. Future directions suggested include handling dynamic graphs (adding/removing vertices), integrating multi‑objective criteria (e.g., sensor placement, energy balancing), and extending the motion protocol to heterogeneous robot capabilities.
Comments & Academic Discussion
Loading comments...
Leave a Comment