Competitive Design of Multiuser MIMO Systems based on Game Theory: A Unified View
This paper considers the noncooperative maximization of mutual information in the Gaussian interference channel in a fully distributed fashion via game theory. This problem has been studied in a number of papers during the past decade for the case of…
Authors: Gesualdo Scutari, Daniel P. Palomar, Sergio Barbarossa
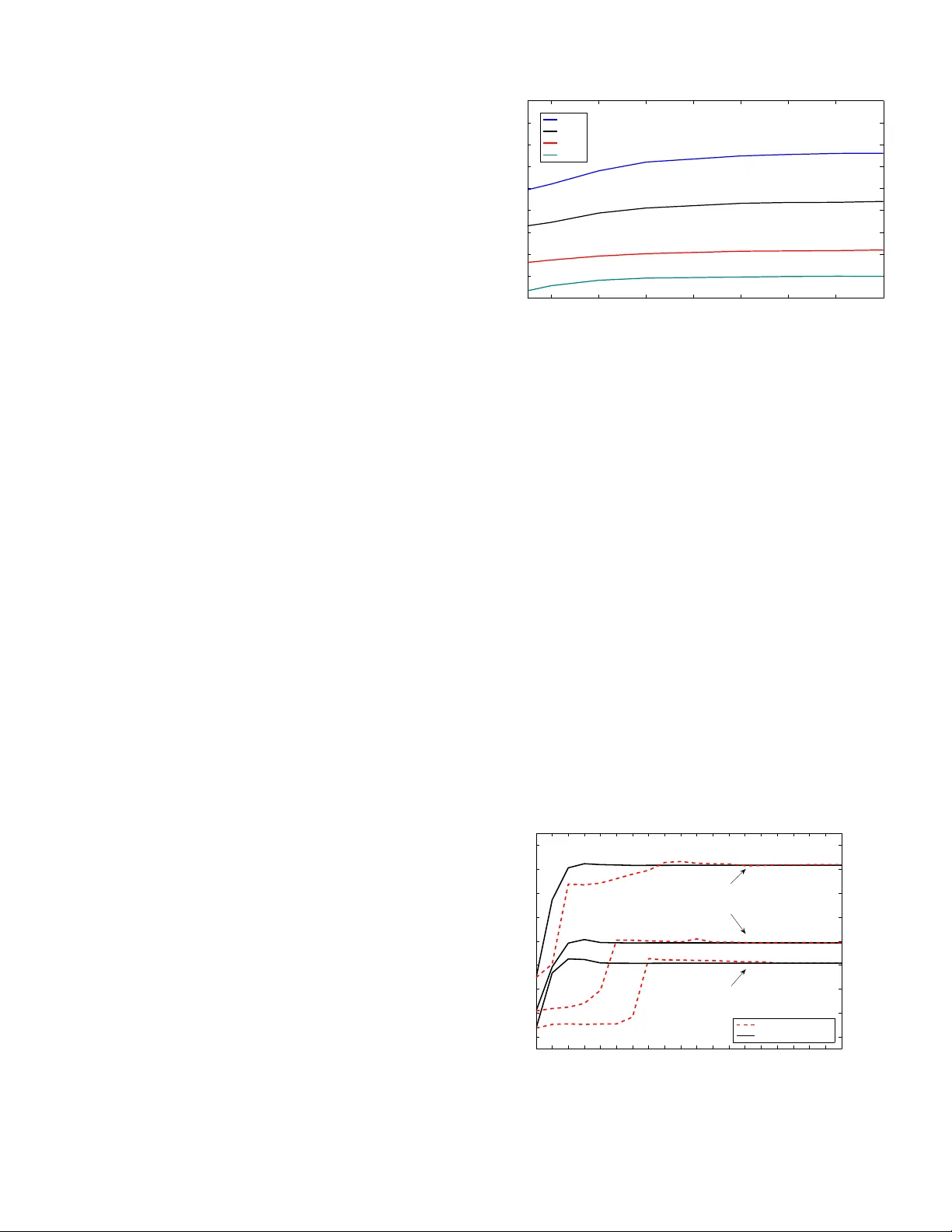
JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 1 Competiti v e Design of Multiuser MIMO Sys tems based on Game Theory: A Unified V ie w Gesualdo Scutari, Member , I EE E, Daniel P . Palomar , Member , IEEE, and Ser gio Barbaross a, Member , IEEE Abstract —This paper considers the noncooperati ve maximiza- tion of mutual information in the Gaussian interference channel in a fully distributed fashion via game theory . Th is problem has been studied in a number of papers during t he past d ecade f or the case of frequency-selectiv e channels. A variety of conditi ons guaranteeing the u niqueness of the Nash Equilibrium ( NE) and con verge n ce of many different distributed algorithms have been derive d . In this paper we pr ovide a unifi ed view of the state-of- the-art results, showing that most of th e techniques pr oposed in the literature to study the game, e ven though apparently different, can be unified using our recent interpretation of th e waterfilling operator as a projection onto a proper polyhedral set. Based on this inter p retation, we then pro vide a mathematical framework, useful to derive a unifi ed set of suffi cient cond itions guaranteeing the uniq ueness of the NE and the global con verg ence of water- filling based asynchronous di stributed algorithms. The proposed mathematical framework is also instrument al to study th e extension of the game to the more general M IMO case, fo r which on ly few results are av ailable in th e current literature. The resulting algorithm is, similarly to the frequency-selective case, an iterativ e asynchronous MIM O waterfilling algorithm. The proof of con verge n ce hin ges again on the interpretation of the M IMO waterfillin g as a matrix p rojection, which is the natural generalization of our results obtained for th e waterfilling mapping i n the frequency-selectiv e case. Index T erms —Game Theory , M IMO Gaussian interference channel, Nash equilibriu m, totally asynchronous algorithms, waterfilling. I . I N T R O D U C T I O N T HE interference chann el is a mathematical mod el rele vant to many physical co mmunica tion chann els an d mu ltiuser systems where multip le uncoord inated links share a commo n commun ication med ium, such as digital subscrib er line s [1], single (o r multi) antenna cellular rad io, ad-h oc wir eless net- works [2], [3], and cogn iti ve radio systems [ 4]. The interferen ce chann el is ch aracterized by its capacity region, defined as the set of rates that can be simultan eously achieved by the users in the sy stem while making the error probab ility arb itrary small. A pragmatic approach that leads to an achievable regio n or inner bound of the cap acity r egion is to restrict the system to op erate as a set of indep endent units, i.e., not allowing multiuser enco ding/deco ding or the use of in terferenc e canc ellation te chniques. This app roach is G. Scuta ri and S. Barba rossa are with the INFOCOM Depa rtment, Uni versity of Rome, “La Sapienz a, ”Rome, Italy . E-mails: { scutar i, sergio } @infocom.u niroma1.it . D. P . Palo m ar is with the Department of Electronic and Computer Engineer- ing, Hong K ong Univ ersity of S cienc e and T echnolo gy , Hong Kong. E-mail: palomar@ust.hk . Manuscript recei ved August 15, 2007; rev ised May 10, 2008. very relev a nt in p ractical sy stems, as it limits the am ount of signaling among the user s. W ith this assumption , m ultiuser interferen ce is treated as add iti ve co lored noise and the sy stem design reduces to findin g the optimu m covariance matrix of the symbols transmitted by each user . W ithin th is context, in this p aper we consider the maximiza- tion of mutual information in a fully distrib uted fashion using a game theoretical approach. Since the seminal paper of Y u et al. [7] in 2002 (and the con ference version in 2001), this problem has been studied in a num ber of works dur ing the past seven years fo r the case of SIS O fr equency -selective channels or , equiv alen tly , a set of p arallel no n-interfe ring scalar ch annels [8]-[20]. In the cited p apers, the maximization of mutua l informa tion is fo rmulated as a strategic n oncoo perative game, where ev er y SISO lin k is a player that co mpetes against th e others by choosing his po we r allocation (transmission strategy) over th e frequ ency b ins (o r parallel channels) to m aximize his own inform ation rate (pay off fu nction). 1 Based on the celebrated n otion of Nash Equilibr ium (NE) in g ame theo ry (cf. [5], [6]), an equ ilibrium for the whole system is re ached when every player’ s reaction is “unilaterally op timal”, i.e., when, given the ri val player s’ current strategies, any change in a player ’ s own strategy would result in a rate loss. This vector-v alue d p ower control game was widely stud ied and se veral sufficient co nditions ha ve been deriv ed that guarantee the u niquene ss of the NE and the conver g ence of altern ativ e distributed waterfilling based alg orithms: sync hronou s s eq uen- tial [7]-[14], synchro nous simultan eous [14], [15], [16], [19], and asynchron ous [17], [20]. Interestingly , different ap proach es ha ve been used in the cited pa pers to an alyze the g ame, most of them based o n the following, apparen tly different, ke y results: 1) the in- terpretation of the waterfilling operator as a pro jection onto a pro per poly hedral set [14], [19]; 2 ) the interpretatio n o f the Na sh equilibria of the game as solutions of a proper affine V ariational Ineq uality (VI) problem [12]; and 3) the interpretatio n of the waterfilling mappin g as a piecewise affine function [16], [40, Ch. 4] . In this paper , we provid e a unified view of these results, showing that they fit naturally in our 1 The choice of the gender of the players is alwa ys contr oversial in the litera ture of game theory . This is reflected mainly on the use the third-person singular pronouns: some a uthors use “ his", while others use “ her ” , and others– more diplomatic ones–ev en use “ his/her ” . English non-nati ve speakers t end to use “ its ” to avoid the problem but that is not w ell accepted by nati ve speak ers. In two-pl ayer zero-sum games, the issue is ev en tricki er an d some authors resort to the use of one gender for the good pl ayer and another for the bad player . See the forew ord in [5] for a relat ed discussion on the issue. In this paper , for simplicity of notat ion an d without further implic ations, we simply use “ his ” . JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 2 interpretatio n o f the waterfilling m apping as a projector [14], [19]. Building on this interpretation and using classical re sults from fixed-p oint and co ntraction th eory (cf. [22], [2 4], [25], [26]), we then develop a mathematical framework useful to derive a unified s et of sufficient cond itions g uaranteein g both the uniqu eness of the NE and the conver g ence of totally asynchro nous iterative waterfilling based algorithms. The prop osed math ematical f ramework is instrumental to study the more gen eral MIMO case, which is a non trivial extension of the SISO frequ ency-selective case. There are indeed only a few papers that hav e studied (special cases of ) the MIMO g ame [21], [27 ] -[31]. In [ 27], the authors fo cused on th e two-user M ISO chan nel. In [ 28]-[30], the autho rs considered the rate maximization game in MIMO interferen ce channels, b u t the y provided only nu merical results to suppo rt the existence of a NE of th e gam e. Fur thermore , in these papers there is no study of th e uniquen ess of the equilib rium and con vergence of the prop osed algo rithms. Finally , in [31], the au thors sh owed that the MIMO rate maximization ga me is a co ncave game (in th e sense o f [32]), imply ing the existence of a NE f or any set of arbitr ary channel matrices [ 32, Theor em 1]. As far as th e uniqu eness of the equilibr ium is concerned, they on ly showed that if the multiuser interfe rence is almost negligible, th en th e NE is un ique, with out quantifying h ow small the interfer ence m ust be. Hence, a practical condition that one can check to guarantee the uniqueness of the NE of the game and con vergence of distributed algo rithms is cu rrently missing. The main difficulty in the MIMO case is that the op timal transmit direction s (i.e., eigenv ecto rs of the transmit cov a ri- ance matr ix) of each user change with the strategies of th e other u sers, as oppo sed to the SISO frequen cy-selecti ve case where only the power allocation depends on the strategies of the o thers, but the directions r emain fixed: i) in the diago nal MIMO case, the tra nsmit direction s are alw ays the canon ical vectors [7]-[1 4]; ii) in the fr equency-selective channel, the transmit directions are the Four ier vectors [18], [19]; iii) for the MISO case, the transmit directions are matched to the v e ctor channels; a nd i v) for the SIMO case, there are no transmit directions to optim ize. For the previous reaso n, the existing results an d tech niques in [7]-[2 0], valid for SISO frequen cy- selecti ve channels, can not be applied or trivially extend ed to the MIMO case. On top of that, another difficulty is the fact that, differently from the vector power control game in [7]-[19], w here there exists an explicit relation ship (via the waterfilling solu tion) among the optimal power allocations of all the users, in th e matr ix-valued MIMO game one ca nnot obtain an explicit expr ession of the optimal covariance matrix of each user at the NE (th e MIMO waterfilling solution ), as a function of the o ptimal covariance matr ices of the oth er users, but there exists only a complicated imp licit relationsh ip, via an eigedecompo sition. Building o n the ma thematical fram ew or k developed f or the SISO case, we can overcome the main d iffi c ulties in the study of th e MIMO gam e inv ok ing a novel interpretatio n of the MI MO waterfilling operato r as a pro jector and its nonexpan sion pro perty , similar to the one for freq uency- selecti ve chan nels. This e nables us to deriv e a unified set of suffi cie nt c onditions that guarantee the uniqueness of the Nash equilib rium of the MIMO ga me and the conver ge nce of totally asynchr onous distributed algorith ms ba sed on th e MIMO waterfilling solu tion. The paper is organized as fo llows . Section I I gives the system model and formula tes th e o ptimization p roblem as a strategic nonco operative g ame. In Sectio n III, we draw the relationship be tween Nash equilib ria of the gam e and fixed points o f no nlinear sets of equ ations, and provide the math- ematical tools necessary to stud y conv ergen ce of distributed asynchro nous algorithm s. Buildin g on the interpre tation o f the multiuser waterfilling solution as a proper projec tion on to a conv ex set, in Sec tion IV, we provid e the main p roperties of the mu ltiuser waterfilling solution either in the SISO or MIMO case, unif ying previous r esults propo sed in the litera- ture to study the rate maximizatio n game in SI SO f requency- selecti ve chann els. The con traction pr operty of th e mu ltiuser waterfilling paves the way to derive sufficient co nditions g uar- anteeing the uniqu eness of th e fixed p oint of the waterfilling projector − alias the NE of th e (SISO/MIMO) game − and th e conv ergen ce of iterative, possibly asynchr onous, distributed algorithm s, as d etailed in Sectio ns V and VI , respectively . Section VII reports some numerical results illustrating the ben- efits of MIMO tr ansceivers in the multiuser co ntext. Finally , Section VIII draws some conclusion s. I I . S Y S T E M M O D E L A N D P RO B L E M F O R M U L A T I O N In this section we in troduce the system mo del and formu late the optimization problem addressed in the paper explicitly . A. System Model W e consider a vector Gaussian interferenc e chan nel com - posed of Q links. In this m odel, there are Q transmitter- receiver pairs, where each transmitter wants to commu nicate with its corr espondin g recei ver over a MIMO channel. The transmission over the generic q -th MIMO channel with n T q transmit and n R q receive dime nsions can be described with the baseband signal model y q = H qq x q + X r 6 = q H r q x r + n q , (1) where x q ∈ C n T q is the vector tr ansmitted by sourc e q , H qq ∈ C n R q × n T q is the d irect chann el of link q , H r q ∈ C n R q × n T r is the cross-ch annel ma trix between source r and destination q , y q ∈ C n R q is the vector r eceiv ed by desti- nation q , and n q ∈ C n R q is a zero-m ean circularly symmetric complex Gau ssian noise v ecto r with arb itrary cov ariance ma- trix R n q (assumed to be nonsin gular). Th e second ter m on the right-ha nd side o f (1) represents the Multi-User Interference (MUI) received by the q -th destina tion and caused by th e other activ e links. For each transmitter q , the total a verage transmit power is E n k x q k 2 2 o = T r ( Q q ) ≤ P q , (2) where T r ( · ) denotes the trac e o perator, Q q , E x q x H q is the covariance matrix of the transmitted vector x q , and P q is JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 3 the maximum average transmitted power in un its of energy per transmission. The system m odel in (1)-(2) p rovides a unified w ay to re p- resent many ph ysical co mmunicatio n channels an d m ultiuser systems of pra ctical interest. What chang es from on e system to the other is the structure of the channe l matrice s. W e may have, in fact, as particular c ases o f (1)-( 2): i) digital subscrib er lines [1], wh ere the chan nel matrices are T oep litz circulant, the matrices Q q = W Diag( p q ) W H incorpo rate the DFT precod ing W H , the vectors p q allocate the power across the frequen cy b ins, and the MUI is mainly cau sed by near-end cross talk; ii) single (o r multi) anten na CDMA cellular ra dio systems, wher e the matrices Q q = F q F H q contain in F q the user codes within a given cell, and the MUI is e ssentially intercell interferen ce [2]; iii) ad-ho c wireless MIMO networks, where the channel matrices r epresent the MIMO ch annel o f each link [3]. Since o ur goal is to find distributed algor ithms that d o not req uire neither a ce ntralized contro l nor a coor dination among the links, we fo cus on transmission techniqu es where no interference canc ellation is perf ormed and multiuser inter - ference is treated as additive colo red no ise from each r eceiv er . Each chan nel is assumed to ch ange sufficiently slowly to be considered fixed du ring th e whole tr ansmission, so that the informa tion theoretica l re sults are meanin gful. Mo reover , per- fect chan nel state info rmation at bo th transmitter and re ceiv er sides of each link is assumed; 2 each receiv er is also assumed to measure with no erro rs the covariance matrix of the n oise plus MUI generated by the other users. Finally , we assume that the channel matrices H qq are square nonsing ular . T he more general case o f po ssibly rectangu lar non full r ank matrices is addressed in [21]. Under these assumptions, in voking the capacity e x pression for the single user Gaussian MIMO ch annel − ach iev able us- ing ran dom Gaussian codes b y all the users − the maximum informa tion rate on link q for a giv en set o f users’ covariance matrices Q 1 , . . . , Q Q is [33] R q ( Q q , Q − q ) = log det I + H H qq R − 1 − q ( Q − q ) H qq Q q (3) where R − q ( Q − q ) , R n q + P r 6 = q H r q Q r H H r q is the M UI plus noise c ov ar iance matrix o bserved by user q , and Q − q , ( Q r ) Q r =1 , r 6 = q is the set o f all the u sers’ covariance matr ices, except the q -th o ne. B. Game Theor etical F ormulation W e formulate the system design within the framework of game theory using as desira ble criterion the conce pt of Nash Equilibriu m (NE) (cf. [5], [ 6]). Sp ecifically , we consider a strategic nonc ooperative game, in which th e players ar e the links and th e payo ff fu nctions are th e inform ation rates on each link: Each player q compete s aga inst the others by choosing his transmit covariance m atrix Q q (i.e., his strategy) that maximizes h is own in formation rate R q ( Q q , Q − q ) in (3), subject to the transmit power constra int ( 2). A solution of th e 2 Note that each user q is only required to known his o wn channel H qq , but not the cross-channels { H r q } r 6 = q from the other users. game − a NE − is reac hed when each u ser , given the strategy profiles of the others, does not get any ra te increase by unilaterally ch anging his own strategy . Stated in ma thematical terms, the game ha s the f ollowing structur e: ( G ) : maximize Q q R q ( Q q , Q − q ) sub ject to Q q ∈ Q q , ∀ q ∈ Ω , (4) where Ω , { 1 , . . . , Q } is the set of play ers (i.e. , the links); R q ( Q q , Q − q ) defined in (3) is the p ayoff function of player q ; and Q q is the set of admissible strategies (the covariance matrices) for player q , defined as 3 Q q , Q ∈ C n T q × n T q : Q 0 , T r { Q } = P q . (5) The solutions of g ame G are forma lly defin ed as follows. 4 Definition 1: A (pu r e) strate g y pr ofile Q ⋆ = Q ⋆ q q ∈ Ω ∈ Q 1 × . . . × Q Q is a NE of g ame G if R q ( Q ⋆ q , Q ⋆ − q ) ≥ R q ( Q q , Q ⋆ − q ) , ∀ Q q ∈ Q q , ∀ q ∈ Ω . (6) T o write the Nash equilibria of game G in a con venien t form, we first introduce the following notations and defini- tions. Given G , for each q ∈ Ω and Q − q ∈ Q − q , Q 1 × . . . × Q q − 1 , Q q +1 × . . . × Q Q , we write the eig endecom position of H H qq R − 1 − q ( Q − q ) H qq as: H H qq R − 1 − q ( Q − q ) H qq = U q D q U H q , (7) where U q = U q ( Q − q ) ∈ C n T q × n T q is a unitary matrix with the eig en vector s, D q = D q ( Q − q ) ∈ R n T q × n T q ++ is a d iagonal matrix with the n T q positive eigenv alues, and R − q ( Q − q ) = R n q + P r 6 = q H r q Q r H H r q . Giv en q ∈ Ω a nd Q − q ∈ Q − q , the solution to problem (4) is the well-known waterfilling s o lution (e.g., [33]): Q ⋆ q = W F q ( Q − q ) , (8) with the w ater filling operator WF q ( · ) defined as WF q ( Q − q ) , U q µ q I − D − 1 q + U H q , (9) where U q = U q ( Q − q ) , D q = D q ( Q − q ) , and µ q is chosen to satisfy T r ( µ q I − D − 1 q ) + = P q , with ( x ) + , ma x (0 , x ) . Using (8) and Definition 1, we can now chara cterize the Nash Equilibria of the gam e G in a com pact way as the following waterfilling fixed-point e quation: Q ⋆ q = WF q ( Q ⋆ − q ) , ∀ q ∈ Ω . (10) Remark 1 - Competitive maximization of tr a nsmission rates. The cho ice of the objective fu nction as in (3) req uires the 3 Observe that, in the definition of Q q in (5 ) the condi tion Q = Q H is redundan t, since any complex positi ve semidefinite m atrix must be necessarily Hermitia n [41, Sec. 7. 1]. Furthermore, we replaced, without loss of generalit y (w .l.o.g.), the original inequality power constraint in (2) with equal ity , since, at the optimum to each problem in (4), the constrai nt must be satisfied with equali ty . 4 Observe that, for the payoff functions defined in (3), we can indeed limit ourselv es to adopt pure strategi es w . l.o.g., as we did in (3), since e very NE of the game can be prov ed to be achie vable using pure strategi es [18]. JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 4 use of ideal Gau ssian codeb ooks with a p roper covariance matrix. In practice, Gau ssian c odes may be substituted w ith simple (suboptim al) finite-or der sig nal constellations, such as Quadratur e Am plitude Modu lation (QAM) or Pu lse Ampli- tude M odulation (P A M), and practica l (subop timal) coding schemes. In this case, in stead o f considerin g the max imization of mutua l informa tion on e ach link, one can f ocus on the competitive maximization of the transmission rate , using finite order constellation, under constraints on transmit power and on the av er age er ror probability P ⋆ e,q (see [18] for more details). Interestingly , u sing a similar ap proach to that in [18], one can prove th at the o ptimal transm ission strategy of each user is still a solution to the fixed-point equ ation in (10), where each channel matrix H qq is rep laced by H qq / Γ q , where Γ q ≥ 1 denotes the gap, which depends only on th e constellations and on the target error prob ability P ⋆ e,q [34]. Remark 2 - Re lated works . The matrix nature o f game G and th e arb itrary structure of the channel matrices make the analysis of the game quite co mplicated, since none of th e results in game theory literatu re can be directly ap plied to characterize solutions of the form (10). T he m ain dif ficu lty in the an alysis comes from the fact that, fo r each user q , the optimal eigenv e ctor matrix U ⋆ q = U q ( Q ⋆ − q ) in (9) depend s, in general, on the strategies Q ⋆ − q of all th e others, th rough a very complicated implicit re lationship − th e eigende composition of the equiv alen t channel matrix H H qq R − 1 − q ( Q ⋆ q ) H qq . In the vector power contro l gam es studied in [7]-[20], the analysis of u niquen ess of the equilibr ium was m athematically more tractable, since scalar freq uency-selective channels are represented b y diago nal matrices (or T oeplitz and circulant matrices [ 18], [ 19]), im plying that the optima l set of eigenvec- tors of any N E become s user-independen t [18]. In the presen t case, it follows that, bec ause of the depende nce of the optimal strategy U ⋆ q ( Q ⋆ − q ) of each u ser on the strategy profile of the others at the NE, o ne cannot use the un iqueness condition of the NE o btained in [7]-[2 0] to guarantee the un iqueness of the NE o f ga me G in (4 ), even if game G reduc es to the power control gam e studied in the cited pape rs, once the optimal users’ s tr ategy profile in (10) is introduce d in (4). At the best of o ur knowledge, th e only paper where game G was partially analyzed is [ 31], wh ere the au thors app lied th e fr amew o rk developed in [32] to the MIMO game and sh owed that the N E becomes u nique if th e MUI in the system − the interf erence-to- noise ratio at each receiver − is sufficiently small, but with out quantify ing exactly h ow much small the MUI must b e. Th us, a practical con dition that one can check to g uarantee the uniquen ess of the NE is still missing. T o overcome the difficulties in the study of game G , we pro- pose next an equ i valent expression o f the waterfilling solu tion enabling us to express the Nash equilibria in (10) as a fixed- point of a more tractable m apping. This alternative expression is based on the n ew interpretation of the MIM O waterfilling solution as a proper projecto r operator . Based on this result, we can then de riv e sufficient conditio ns for the uniqueness of the NE and conver ge nce of asynch ronou s distributed algorithms, as detailed in Sections V and VI respectively . I I I . N A S H E QU I L I B R I U M A S A F I X E D P O I N T Before providin g on e o f the ma jor results of the paper − the contraction prop erties of th e MIMO multiuser waterfilling projector − we rec all and unify some standard results from fixed-point [25] and contraction theo ry [22 ], [24] that will b e instrumental for o ur deriv ation s (recall from (1 0) that any NE can be interpreted as a fixed point of the waterfilling mapping). The proposed unified mathematical framew ork is also useful to establish an interesting link am ong the alternative, apparently different, approaches proposed in the literature to study the rate maximization gam e in SISO freq uency-selective interference channels [7]-[1 4], sh owing that most o f the resu lts in [7]-[14] can be unified by o ur inter pretation of the waterfilling as a projector [14], [19]. A. Existence and Uniqueness of a F ixed -point Let T : X 7→ X be any ma pping fro m a su bset X ⊆ R n to itself. One can associate T to a dyna mical system describ ed by the follo wing discrete-time equation: x ( n + 1) = T ( x ( n )) , n ∈ N + , (11 ) where x ( n ) ∈ R n is the vector of the state v ar iables of the system at (d iscrete) time n, with x (0) = x 0 ∈ R n . T he equilibria of the system, if they exist, ar e the vectors x ⋆ resulting as a solution of x ⋆ = T ( x ⋆ ) , i.e., the fixed-po ints of mapping T . The study of th e existence and uniqu eness of an equilibrium of a dy namical system has been widely addressed either in fixed-po int th eory (cf. [22], [24], [25]) or control th eory (cf. [26], [3 5], [36]) literature. Many alter native condition s a re av ailable. Through out th is pa per , we will use the following. Theor em 1: Given the d ynamical system in (11) with T : X 7→ X and X ⊆ R n , we have the fo llowing: a) Existenc e ( cf. [24], [25]): If X is n onempty , conve x and compact, an d T is a continu ous mapping, then th er e exists some x ⋆ such that x ⋆ = T ( x ⋆ ); b) Un iqueness ( cf. [2 2], [24], [2 5]) : If X is closed and T is a contraction in some vector no rm k·k , with modu lus α ∈ [0 , 1 ) , i.e. , T ( x (1) ) − T ( x (2) ) ≤ α x (1) − x (2) , ∀ x (1) , x (2) ∈ X , (12) then the fixed-point of T is uniq ue . Remark 3 - Su fficiency of th e conditions. The con ditions of Theorem 1 are o nly sufficient for th e existence an d uniqu eness of the fixed po int. Ho wever , this d oes not m ean that some of them can be removed. For example, th e con vexity assump tion in the existence condition canno t, in general, be removed, as the simple one-dimensio nal example T ( x ) = − x a nd X = {− c, c } , with c ∈ R , shows. Remark 4 - Choice of the n orm. T he contr activ e property o f the m apping is norm-depe ndent , in the sense th at a mappin g may b e c ontractive fo r some cho ice of the nor m on R n and, at the same time, it may fail to b e so und er a d ifferent norm. On the other ha nd, it may h appen that a mapping is a contraction in more than one norm. In such a case, e ven though JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 5 the un iqueness of the fixed-point is guaranteed whatever the choice of the nor m is ( cf. Theorem 1), the conver g ence of different algor ithms, based on the same mapp ing T , to the fixed-point is, in gener al, norm-d ependen t. Th us, the choice of the proper norm is a critical issue an d it a ctually gives us potential d egrees of freedom to be explo red in the characteri- zation of the conver g ence p roperties of the desired algorith ms used to reach the fixed- point. W e ad dress this issue in the next sections, where we intro duce a pro per norm , tailore d to our needs. B. Conver gence to a F ixe d-point Nonlinear fixed-point pro blems are typically solved by itera- ti ve metho ds, especially when one is intere sted in distributed algorithm s [22], [24]. In fact, the mapping x 7→ T ( x ) can be interpreted as an algorithm f or finding such a fix ed poin t. The degrees of f reedom are in the choice of the specific updating scheme among the co mponen ts of vector x , b ased on map ping T . More specifically , denoting by x = ( x 1 , . . . , x Q ) a partition of x , with x q ∈ R n q and n 1 + . . . + n Q = n, and assum ing X = X 1 × · · · × X Q , 5 with each X q ⊆ R n q , the most com mon updating strategies for x 1 , . . . , x Q based on mapping T are [22], [24]: i) J aco bi scheme: All compon ents x 1 , . . . , x Q are up- dated simultaneously , via th e mapping T ; ii) Gauss-Seidel scheme: All componen ts x 1 , . . . , x Q are updated sequentially , one afte r the oth er , via th e mapping T ; iii) T otally asynchr onou s scheme: All compon ents x 1 , . . . , x Q are updated in a totally asyn chr on ous way (in th e sense of [ 22]), via the mapping T . Ac- cording to th is sch eme, some comp onents x q may be updated more freque ntly tha n o thers and, when they are updated , a p ossibly outdated in formation on the other comp onents can be used. Some v ar iations of such a totally asynchr onous scheme, e.g. , includin g constraints o n the m aximum tolerable delay in the updating an d o n th e use of the outdated infor mation (which lead s to the so- called partia lly asynch ronou s algorithm s), can also be considered [22]. Observe that the latter algo rithm contains, as spec ial cases, the first two ones. In general, the ab ove algorithms converge to the fixed-point of T under dif f erent condition s [ 22], [24]. Ho w- ev er, we can obtain a unified set of co n vergence co nditions (not n ecessarily th e mildest o nes) by studying th e con traction proper ties of mapping T under a proper choice of the norm. T o prove the convergence of th e totally async hrono us algorithm s, a usef ul no rm is the so- called block-maximum no rm, define d as follows. According to the partition x 1 , . . . , x Q of x an d T = ( T q ) Q q =1 , with T q : X 7→ X q , let k·k q denote a ny vector norm on R n q for each q , the block -maximu m norm o n R n is defined as [22], [24 ] k T k block = max q k T q k q . (13) 5 For the sake of simplici ty , we focus on mappings T whose domain can be writte n as the Cartesian pro duct of lower dimensiona l sets, associat ed to the partiti on of the mapping. For our purposes, this choic e is enough, since the joint admissible strate gy set of game G satisfies this condition. The map ping T is said to be a block -contrac tion with mod ulus α ∈ [0 , 1) if it is a contraction in the b lock-max imum norm with mod ulus α . A u nified set of conv ergen ce cond itions for distributed algo rithms based on map ping T is given in the following theo rem, whose proof follows th e same steps as in [20, Append ix A] and is o mitted here because of the space limitation (see also [2 1]). Theor em 2: Given the map ping T = ( T q ) Q q =1 : X 7→ X , with X = X 1 × · · · × X Q , assume that T is a block-contraction with modu lus α ∈ [0 , 1) . Then, the to tally asynchr onou s algorithm ( cf. [ 22]) ba sed on the mapping T asymptotically conver ges to the uniqu e fixed -point of T , fo r a ny set of initial condition s in X and updating schedule . Theorem 2 provides a un ified set o f conv e rgence conditions for all the alg orithms that are sp ecial cases of the to tally asyn- chrono us algorith m. W eaker co nditions can still be obtained if one is not interested in a totally asynch ronou s i m plementation . For example, if only the Jacobi updating scheme is con sidered, to prove the contractio n pro perty of T , one can use any arbitrary norm on R n [22], [24]. C. Contraction Theory , Lyapunov Function, and V ariational Inequa lity Pr oblems Contraction th eory is not the only instrumen t a vailable to prove the conv ergen ce of distributed algorithms to the fixed-point of a mappin g T . So far , we hav e seen that any mapping T defines a dynam ical system (see (11)). Hence, the conv ergen ce of distrib u ted algorithms to the fix e d-point of T can be r eformu lated as the study of the g lobally asymptotic stability of the equ ilibrium of a proper dynamical system, based on T . From th is perspective, L ya punov theory is a valuable instrumen t to study the system behavior an d, as a by-pr oduct, the conv ergen ce of distributed algor ithms [26], [35]. In deed, th e co ntraction pr operty of mapping T in the vector norm k·k implies the existence of a valid L yapu nov function f or the dy namical system in (1 1) [26], [35], giv e n by V ( x ) = k x − x ⋆ k . This guara ntees the convergence of a Jacobi scheme b ased on mapping T . I nterestingly , in th e case of contraction of mappin g T in the block maximu m norm (13), the L yapun ov fun ction V ( x ) = k x − x ⋆ k block can be interpre ted as the common L yapun ov fun ction of a set of in terconn ected dynamica l systems, each o f them associated to the p artition x 1 , . . . , x Q of x [36]. Finally , it is interesting to obser ve that the conv ergen ce to the fixed-poin t of a map ping T can also b e studied introd ucing a proper t r ansformatio n of T that preserves the set of the fixed- points. A useful tool to explore this direction is given by the variational inequa lity theory [39], [40] (see, e.g., [1 2], [19] and Section IV -A for an application of this framew o rk to the multiuser w ater filling mapping ). W e a re now re ady to apply the previous g eneral framework to the multiuser w ater filling mapping in (9), as detailed next. I V . C O N T R AC T I O N P RO P E RT I E S O F T H E M U LT I U S E R W A T E R FI L L I N G M A P P I N G So far we h av e seen that a unified s et of conditio ns guaran teeing the uniqueness o f the NE and the convergence JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 6 of to tally asynch ronou s algorithm s to the fixed-poin t Nash equilibria of game G can be obtained deriving con ditions for the multiuser waterfilling mapping in ( 9) to be a contr action in a proper blo ck-maxim um n orm (see Theorems 1 a nd 2) . In this section we then p rovide a c ontraction th eorem for the m ultiuser waterfilling o perator . Our re sult is based on the interpr etation of MIMO waterfilling operator as a matrix projection onto th e conv ex set of feasible strategies o f the users. This result is also useful to obtain a u nified view of, apparen tly different, tech niques used in the literature to stu dy the uniqu eness of the NE and the conver g ence of altern ati ve waterfilling based algorithms in th e rate-maximiza tion game over S ISO fr e quency-selective Gaussian interference channels [7]-[20]. T o show this in teresting relation ship, we start f rom an overview of the ma in prop erties of the Nash equilibr ia of game G in the case of SISO freq uency-selective Gaussian interferen ce channels, as obtained in [14], [19], [20], [12], [16], and [ 7], [1 5], an d th en we co nsider th e mo re general MIMO case. A. F requency-Selective Gaussian I nterfer ence Channels In th e case o f block tran smission over SISO frequ ency- selecti ve chan nels [7]-[20], each channel matrix H r q ∈ C N × N becomes a T oep litz circulant matrix and n T q = n R q = N , where N is the leng th of the tran smitted block (see, e.g., [18]). This leads to the eigendecom position H r q = WD r q W H , where W ∈ C N × N is the norm alized IFFT ma trix, i.e., [ W ] ij , e j 2 π ( i − 1)( j − 1) / N / √ N f or i , j = 1 , . . . , N and D r q is a N × N d iagonal matrix, where [ D r q ] kk , H r q ( k ) is the frequen cy-response of the ch annel betwe en sou rce r an d d es- tination q at carrier k , and R n q = Diag ( σ 2 q (1) , . . . , σ 2 q ( N )) . Under this setup, the matrix game G in (4) reduces to a s im pler power control game, wh ere the strategy of each user q beco mes the power allocation p q = [ p q (1) , . . . , p q ( N )] T over the N carriers and the ad missible strategy set in (5) reduces to 6 P q , ( x ∈ R N + : N X k =1 x k = P q , ∀ k ∈ { 1 , . . . , N } ) , (14) and P , P 1 × . . . × P Q . It f ollows tha t the op timal strategy at any NE must satisfy th e simultaneou s multiuser waterfilling equation: p ⋆ q = wf q ( p ⋆ − q ) , ∀ q ∈ Ω , (15) where p − q , ( p r ) r ∈ Ω ,r 6 = q , a nd the waterfilling op erator wf q ( · ) becomes [19] [ wf q ( p − q )] k , µ q − σ 2 q ( k ) + P r 6 = q | H r q ( k ) | 2 p r ( k ) | H qq ( k ) | 2 ! + , (16) for k ∈ { 1 , . . . , N } , with th e waterlev el µ q chosen to satisfy the power constrain t P N k =1 p q ( k ) = P q . 6 In the transmissions ov er frequenc y-selecti ve cha nnels, in additio n to the po wer constraints as in (14), it may be useful to introduce spectral mask constrai nts, in order to impose radiat ion limits ove r some (li censed) bands [12], [1 9 ], [20], [14]. Inte restingly , all the re sults presented on this section are vali d also in the presence of spectral mask constraints, as prove d in [12], [19], [20 ], [14]. Different ap proache s have been proposed in the literatu re to stud y the pro perties of the Nash equilibria in ( 15), ea ch time obtaining milder c onditions for the un iqueness a nd th e conv ergen ce of distributed alg orithms [7]-[ 20]. W e provide in the following a unified view of th e techniqu es used in the cited p apers, ba sed on the mathem atical framework d escribed in Section III. Ap proac h #1 : Multiuser wa terfilling a s a projector [14], [19] - W e introdu ce first the following intermediate definitions. For any given p − q , let insr q ( p − q ) be the N -dimension al vector d efined as [ insr q ( p − q )] k , σ 2 q ( k ) + P r 6 = q | H r q ( k ) | 2 p r ( k ) | H qq ( k ) | 2 , (17) with k ∈ { 1 , . . . , N } . In ord er to app ly Theorem 2 , we introdu ce a prop er block -maximu m n orm fo r the multiuser waterfilling mappin g wf = ( wf q ( p − q )) q ∈ Ω in (1 6) (cf. Section I II-B). Given som e w , [ w q , . . . , w Q ] T > 0 , let k·k w 2 , block denote the (vector ) block-max imum norm , defin ed as [22] k wf ( p ) k w 2 , block , ma x q ∈ Ω wf q ( p − q ) 2 w q , (18) where k·k 2 is the Euclidean no rm. Let k·k w ∞ , vec be the ve ctor weighted maximum norm , d efined as [41] k x k w ∞ , vec , max q ∈ Ω | x q | w q , w > 0 , x ∈ R Q , (19) and le t k·k w ∞ , mat denote the matrix no rm in duced by k ·k w ∞ , vec , giv e n b y [41] k A k w ∞ , mat , max q 1 w q Q X r =1 | [ A ] qr | w r , A ∈ R Q × Q . (20) W e also introdu ce the non negativ e matrix S max ∈ R Q × Q + , defined as [ S max ] qr , max k ∈{ 1 ,...N } | H qr ( k ) | 2 | H qq ( k ) | 2 , if r 6 = q , 0 , otherwise. (21) Using the above definitions and denotin g by [ x 0 ] X = argmin z ∈ X k z − x 0 k 2 the Euclid ean projection of vector x 0 onto the co n vex set X , in [14], [ 19] we pr oved the following. Lemma 1 ( W aterfilling as a projector ): The waterfilling operator wf q ( p − q ) in (16) c an be e quivalently written as wf q ( p − q ) = [ − insr q ( p − q )] P q , (22) wher e P q and insr q ( · ) a r e defi ned in (1 4) and (1 7), r espec- tively . It follows fro m Lemma 1 that th e Nash equilibria in (15) can be alternativ ely obtained as the fixed-points of t h e mapping defined in (22) p ⋆ q = − insr q ( p ⋆ − q ) P q , ∀ q ∈ Ω . (23) Lemma 1 is also th e key r esult to stud y con traction pr operties of mappin g wf and thus, based on (23), to der iv e condition s JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 7 for the u niquen ess of th e NE an d co n vergence of distributed algorithm s. Th e main result is summ arized in the following theorem that comes from [1 9, Proposition 2]. 7 Theor em 3 ( Contraction property of the m apping wf ): Given w , [ w 1 , . . . , w Q ] T > 0 , the map ping wf defin ed in (16) is Lipschitz continuous on P : wf ( p (1) ) − wf ( p (2) ) w 2 , blo ck ≤ k S max k w ∞ , mat × p (1) − p (2) w 2 , blo ck , (24) ∀ p (1) , p (2) ∈ P , whe r e k·k w 2 , block , k·k w ∞ , mat , and S max ar e defined in (18), (20), a nd (2 1), r espectively . Furthermore , if k S max k w ∞ , mat < 1 , (25) then ma pping wf is a block-con traction w ith m odulus k S max k w ∞ , mat . Giv en Theor em 3, it fo llows from Theorem 1 and Theorem 2, that cond ition k S max k w ∞ , mat < 1 is sufficient to guara n- tee the uniquen ess of the NE of the g ame as well as the conv ergen ce of totally asynchr onous algorithm based on the waterfilling mapping wf in (16) [19], [20]. Ap proac h #2: Multiuser wat erfilling as solution o f an Affine VI [1 2] - In [ 12], the a uthors established an interesting reform ulation o f the r ate maximization ga me as a linear compleme ntarity prob lem (LCP) [39]. More specifically , they proved that the non linear s y stem of KKT optimality condition s of the q -th u ser co n vex prob lem in G , given by [where a ⊥ b means th at the two scalars a and b are orth ogonal, i.e., a · b = 0 ] 8 − | H qq ( k ) | 2 σ 2 q ( k ) + P Q r =1 | H r q ( k ) | 2 p r ( k ) + µ q − ν q,k = 0 , ∀ k , 0 ≤ µ q ⊥ P q − P N k =1 p q ( k ) ≥ 0 , 0 ≤ ν q,k ⊥ p q ( k ) ≥ 0 , ∀ k , (26) is equiv alent to [12, Prop osition 1]: 0 ≤ p q ( k ) ⊥ σ 2 q ( k ) | H qq ( k ) | 2 + Q P r =1 | H r q ( k ) | 2 | H qq ( k ) | 2 p r ( k ) + λ q ! ≥ 0 , ∀ k , λ q = free, P N k =1 p q ( k ) = P q . (27) As observed in [12], (27) for all q ∈ Ω rep resents the KKT cond itions of th e A ffine VI (A VI) ( P , ˜ σ , M ) defined by the poly hedral set P and the af fine map- ping p 7→ ˜ σ + Mp (see [39] for more de tails on the A VI problem s), where p , [ p T 1 , . . . , p T Q ] T , ˜ σ , [ ˜ σ T 1 , . . . , ˜ σ T Q ] T , an d M is a block partition matrix M , [ M r q ] r,q ∈ Ω , with p q = [ p q (1) , . . . , p q ( N )] T , ˜ σ q = [ σ 2 q (1) / | H qq (1) | 2 , . . . , σ 2 q ( N ) / | H qq ( N ) | 2 ] T and M qr , 7 W e refer the int erested reader t o [19], [2 0 ] for mode general result s on contrac tion properties of the wf ma pping. 8 Observe that in [12 ], the authors considered equiv alently for each user q ∈ Ω the po wer constraint P N k =1 p q ( k ) ≤ P q , rather than P N k =1 p q ( k ) = P q , as we did in (14). Diag | H r q (1) | 2 / | H qq (1) | 2 , . . . , | H r q ( N ) | 2 / | H qq ( N ) | 2 , fo r r , q ∈ Ω . It follows that th e vector p ⋆ ∈ P is a NE of the g ame G if and only if it satisfies the A VI ( P , ˜ σ , M ) [39], [40]: ( p − p ⋆ ) T ( ˜ σ + Mp ⋆ ) ≥ 0 , ∀ p ∈ P . (28) Building on this result and th e properties of A VI problems (cf. [39], [40]), the authors in [12] deriv ed sufficient conditio ns for the uniquene ss o f th e Nash eq uilibrium and the globa l conv ergen ce of synchro nous sequ ential IWF A. It can be show that the A VI ( P , ˜ σ , M ) in (28) is equivalent to the fixed-p oint equ ation in (23) [40], [39], estab lishing th e link between the solutions to (28) − the fixed-points of the waterfilling map ping wf in (1 6) − and the interpretation of the mapping wf as a projec tion (Lemma 1), as g iv en in [ 14], [19] 9 . In fact, the con vergence condition s obtaine d in [12] fo r the synchrono us seq uential IWF A coincide with (25) (for a proper choice of vector w [19]). 10 Observe th at they are a special case of those ob tained in [2 0, Corollary 2]. Ap proac h #3: Multiuser wa terfilling as a piecewise a ffine function [1 6], [40, Ch. 4 ] - In [1 6], the au thors proved glo bal conv ergen ce of different waterfilling based algorithms b uildin g on the ke y result that the waterfilling m apping wf : P 7→ P can b e equiv alen tly written as a piecewise affine (P A) fu nction on R QN [40, Ch. 4]. In fact, the result in [16] follows the same steps a s Propo sitions 4.1.1 and 4.2.2 in [40, Ch. 4 ] and, interestingly , can be obtained directly from our interpr etation of the wf as a projection (Lemma 1) and some properties of the P A func tions in [ 40, Ch. 4] , as detailed next. W e intro duce the following intermed iate defin itions first. Definition 2 ([40, Def. 4.1.3]): A continuous function f : R n 7→ R m is said to be piecewise affine (P A) if ther e exists a finite family o f affine functions { f k ( x ) = A k x + b k } K k =1 for some positive inte ger K an d { ( A k , b k ) } K k =1 , with each f k : R n 7→ R m , such th at for a ll x ∈ R n , f ( x ) ∈ { f 1 ( x ) , . . . , f K ( x ) } . P A function s hav e many interesting prop erties (we ref er the inter ested reader to [40, Ch. 4] for an in-dep th study of the theory of P A fun ctions). Her e, we are inter ested in th e following one , which follows directly f rom [40, Prop osition 4.2.2 (c)]. Lemma 2: Any P A map f : R n 7→ R m is glob ally Lipsch itz continuo us on R n : f ( x (1) ) − f ( x (2) ) vec ≤ α x (1) − x (2) vec , ∀ x (1) , x (2) ∈ R n , (29 ) with Lipschitz constant α , max k ∈{ 1 ,... ,K } k A k k mat , where k·k vec is any vector norm and k·k mat is the matrix norm induced by k·k vec . The link b etween our in terpretation of th e wf m apping as a projector (Lemma 1 ) and the interpretatio n of wf as P A map ([16, The orem 5]) is g i ven by the following [40, Pr op. 4.1.4 ]. 9 Pape rs [18], [19] have been originally submitted on September 2004. 10 Recal l that conditio n (25) is valid also for the con verge nce of the async hronous IWF A (Theorem 2) [20]. JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 8 Lemma 3: Let X b e a polyhed ral set in R n . 11 Then, the Euclidean pr ojector onto X is a P A function on R n . According to Le mma 1, for any given p ≥ 0 , the wa- terfilling wf ( p ) in (1 6) is th e E uclidean projector of vector − insr ( p ) , − [ insr 1 ( p − 1 ) T , . . . , insr Q ( p − Q ) T ] T onto the conv ex set P , wh ich is a polyhe dral set. I t then follows fr om Lemma 3 th at wf ( p ) is a P A function , i.e., there exists a finite family of affine func tions { f k ( p ) = A k p + b k } K k =1 such that, for e very p ≥ 0 we h av e wf ( p ) = A k p + b k , for some k ∈ { 1 , . . . K } , (3 0) which coincides with the result in [16, Theorem 5]. The expression of the affine pieces { ( A k , b k ) } K k =1 of wf ( p ) can be ob tained explor ing th e structur e of th e waterfilling solution (16). W e omit the d etails here becau se of space limitations (see ([16, Theorem 5]). Contraction p roperties of the wf operato r interpreted as P A map on R QN as stated in [16, The orem 7] are a direct consequen ce of p roperties of the P A fu nctions. In particu lar , it follows from Lemma 2 that, if α = max k ∈{ 1 ,... ,K } k A k k mat < 1 , (31) then the wf m apping is a co ntraction in the vecto r norm k · k vec . Exp loring different vector nor ms, o ne ca n easily obtain different sufficient conditio ns for the uniqueness of the NE of the game and th e conv ergen ce of distributed algorithm s, based on the wf mappin g. Observe that, accord ing to Theo rem 2, if a block-m aximum norm is used in (2 9) (see also Theo rem 3 and Theorem 5 in Section IV -B2), then condition (31) guarantees also the global con vergence of totally asynchr ono us algorithms [20], [16]. Ap proac h #4: Multiuser waterfilling via the ma x-lemma [7], [15] - In [15], the au thors, among all, derived conditions for the glo bal co n vergence o f the synchr onous sequen tial and simultaneou s iterativ e waterfilling algorithm s (implyin g also the uniqu eness of the NE). Cond itions in [15] gen eralize those o btained in [7] for the two-player gam e to the case of arbitra ry num ber of p layers. W e show now that results in [15] come from Theor em 2 as special case, if a prop er vector norm is cho sen. T o th is end, we intro duce first the following intermediate definitions and results. A key point in the p roof of co n vergence in [15] is given by the following max-lem ma [ 15, Lemma 1 ]. Lemma 4: Let f : R 7→ R and g : R 7→ R be a non- decr ea sing and non-in cr easing function s on R , r espectively . If th er e e x ists a uniq ue x ⋆ such that f ( x ⋆ ) = g ( x ⋆ ) , and function f and g a r e strictly incr ea sing and strictly decreasing at x = x ⋆ , then x ⋆ = argmin x { max { f ( x ) , g ( x ) } } . (32) 11 Roughly speaking, a polyhedra l is the interse ction of a finite number of halfspac es and hyperplanes (see, e.g., [42, Ch. 2.2. 4]). Let us introduce the following error dy namic, as d efined in [15]: e q ( n + 1) , max ( X k h p ( n +1) q ( k ) − p ( n ) q ( k ) i + , X k h p ( n +1) q ( k ) − p ( n ) q ( k ) i − ) , (33) with n ∈ N + = { 0 , 1 , 2 , . . . } , where p ( n ) q = [ p ( n ) q (1) , . . . , p ( n ) q ( N )] T is th e vector of the power allocation of u ser q ∈ Ω , gen erated at the discrete time n by the sequen- tial or simultan eous IWF A [starting from any arbitr ary feasible point p (0) ], [ x ] + , max(0 , x ) , an d [ x ] − = max (0 , − x ) . Using Lem ma 4 an d fo llowing the same steps as in [1 5], results in [1 5] can be re stated in term s of the err or vector e ( n +1) , [ e ( n +1) 1 , . . . , e ( n +1) Q ] as: e ( n +1) ∞ , vec ≤ α e ( n ) ∞ , vec , ∀ n ∈ N + , (34) where α , ( Q − 1) max k, r 6 = q | H r q ( k ) | 2 | H qq ( k ) | 2 , and k·k ∞ , vec denotes the l ∞ norm [see (19) with w = 1 ]. It follows f rom ( 34) that, under α < 1 , both synchro nous sequ ential and simultan eous IWF As glob ally converge to th e un ique NE o f th e gam e [7], [15]. Observe that this condition implies the contractio n o f the waterfilling map ping as g iv en in Theorem 3 , sho wing the more generality of our sufficient cond ition (2 5) than that in [7], [15]. Extension : W e g eneralize now the results in [7], [15], s o that we can use Th eorem 2 and enlarge the conver g ence conditions of [7], [15], m aking them to coincide with (25) and valid also for the asynchr onous IWF A [20]. T o this end, we intr oduce a new vector norm, as detailed n ext. Inspired by (33), we intr oduce the f ollowing nor m: k x k 1 , ∞ , vec , ma x n ( x ) + 1 , vec , ( x ) − 1 , vec o , x ∈ R N , (35) where k·k 1 , vec denotes the l 1 norm [4 1]. Some properties of k·k 1 , ∞ , vec are listed in the fo llowing lemma (we omit the pro of because of space limitatio n). Lemma 5: The n orm k·k 1 , ∞ , vec in ( 35) is a valid vector norm ( in the sense that it satisfies the axioms of a norm [41]). Mor eover , the following n onexpansion pr o perty holds tr u e : 12 ( µ x 1 − x 0 ) + − µ y 1 − y 0 + 1 , ∞ , vec ≤ k x 0 − y 0 k 1 , ∞ , vec , ∀ x 0 , y 0 ∈ R N + , (36) wher e the wa terlevels µ x and µ y satisfy 1 T ( µ x 1 − x 0 ) + = 1 T µ y 1 − y 0 + = P T , ( with P T an arbitrary nonnegative number ), and 1 de notes the N - dimensional vector of a ll ones . Interestingly , Lemma 5 provides the nonexpan sion p roperty of the (single-user) waterfilling solution in the vector norm k·k 1 , ∞ , vec . It also represen ts the key result to p rove the contraction pr operty of the mu ltiuser waterfilling map ping wf 12 Interest ingly , one can prov e tha t the nonexpansion property as stated in (36) also holds true if in (36) the norm k· k 1 , ∞ , vec is replace d by the l 1 norm. JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 9 in (16) in the blo ck-maxim um norm k·k w 1 , ∞ , block associated to k·k 1 , ∞ , vec , defined, for each w , [ w 1 , . . . , w Q ] T > 0 , as k wf ( p ) k w 1 , ∞ , block , max q ∈ Ω wf q ( p − q ) 1 , ∞ , vec w q . (37) The main result is stated next (the proo f is based on Lemma 5 and follows similar steps of that in [20, Appe ndix A]; see also Theorem 5 in Sectio n IV -B2). Theor em 4 ( Contraction property of mapping wf ): Giv en w , [ w 1 , . . . , w Q ] T > 0 , th e ma pping wf defi ned in (16) is Lipschitz continuou s on P : wf ( p (1) ) − wf ( p (2) ) w 1 , ∞ , blo ck ≤ k S max k w ∞ , mat × p (1) − p (2) w 1 , ∞ , blo ck , (38) ∀ p (1) , p (2) ∈ P , wher e k·k w 1 , ∞ , block , k ·k w ∞ , mat , and S max ar e defined in (37), (20), a nd (2 1), r espectively . Comparing Theo rem 3 with Theo rem 4, o ne infers that both theo rems p rovide the same sufficient cond itions fo r the waterfilling map ping wf to be a contra ction and thus th e same sufficient conditions gu aranteeing the u niqueness of the NE and the con vergence of asynchron ous IWF As [19], [20]. B. MIMO Gaussian Interfer ence Channels In this section, we generalize our interpr etation of the water - filling projector in the frequ ency-selectiv e case to the MIMO multiuser case. For the sake of simplicity , we concentrate on MIMO systems wh ose direct chan nel m atrices H qq are square and nonsingular . The more general case is much more in volved and goes beyond th e scope of the present paper; it has been considered in [21]. 1) Multiuser waterfilling in Ga ussian MIMO in terfer ence channels : W e first introdu ce the follo win g intermediate result. Pr oposition 1: Given R n ≻ 0 , H ∈ C n × n , an d P T > 0 , let define the following two conve x optimization pr o blems : (P1) : maximize X 0 log det R n + HXH H sub ject to T r { X } ≤ P T , (39) and (P2) : minimize X 0 k X − X 0 k 2 F sub ject to T r { X } = P T . (40) If X 0 in (P2 ) is chosen as X 0 = − H H R − 1 n H − 1 , then both pr oblems (P1) and (P2) have the same unique solu tion . Pr oof: Problem (P1) [an d (P2 )] is c on vex and admits a unique solutio n, since the ob jecti ve fun ction is strictly concave (and strictly co n vex) on X 0 . The Lag rangian function L associated to (39) is L = − lo g det R n + HXH H − T r( ΨX )+ λ (T r( X ) − P T ) , (41) which leads to the following KKT optimality conditio ns (Slater’ s conditions are satisfied [42, Ch. 5.9.1 ]): − H H R n + HXH H − 1 H + λ I = Ψ , (4 2) Ψ 0 , X 0 , T r( ΨX ) = 0 , (43) λ ≥ 0 , λ ( T r( X ) − P T ) = 0 , T r( X ) ≤ P T . ( 44) First of all, obser ve that λ must be positive. Otherwise, (4 2) would lead to 0 ≻ − H H R n + HXH H − 1 H = Ψ 0 , ( 45) which cannot b e true. W e rewrite now (4 2)-(44) in a more conv en ient form . T o this end, we introduce X 0 , − H H R − 1 n H − 1 ≺ 0 , (46) so that H H R n + HXH H − 1 H = ( X − X 0 ) − 1 ≻ 0 . (47) Then, usin g the fact that λ > 0 and ab sorbing in (4 2)-(43) the slack v ariab le Ψ , system (4 2)-(44) can be rewritten a s X h − ( X − X 0 ) − 1 + λ I i = 0 , (48) X 0 , − ( X − X 0 ) − 1 + λ I 0 , (49) λ > 0 , T r( X ) = P T , ( 50) where in (48) we h av e used th e fo llowing fact [38, fact 8.10 .3] T r( ΨX ) = 0 ⇔ ΨX = 0 , ∀ Ψ , X 0 . (51) Since λ > 0 , (4 8)-(50) b ecome X ( X − X 0 ) − 1 λ I = 0 , (52) X 0 , − ( X − X 0 ) − 1 + λ I 0 , (53) λ > 0 , T r( X ) = P T . ( 54) W e show now that (52)-(54) is equi valent to X [( X − X 0 ) + µ I ] = 0 , (55) X 0 , X − X 0 + µ I 0 , (56) µ = free , T r( X ) = P T . (57) (52)-(54) ⇒ (55)-(57): Let ( X , λ ) be a solu tion of (52)-(54). A solution of (55)-(57) is obta ined using ( X , µ ) , with µ = − 1 λ . (55)-(57) ⇒ (52)- (54): Let ( X , µ ) be a solution of ( 55)-(57). It must b e µ < 0 ; otherwise, since X − X 0 ≻ 0 [see ( 46)], (5 5) would lead to X = 0 , which contra dicts the power constraint in (57). Setting λ = − 1 µ , it is easy to check that ( X , λ ) satisfies (52)-(54). The system (55)-(57) represents the KKT optimality con- ditions of problem (40) with X 0 defined in (46); which completes the proof. Denoting by [ X 0 ] Q q the matr ix projection of X 0 with respect to th e Frob enius norm on to the set Q q defined in (5) − the solution to problem (P2) in ( 40) with P T = P q − and using Proposition 1 we have d irectly the follo wing . 13 13 A more genera l e xpression of the waterfill ing project ion v alid for the general case of s ingula r (possibly) recta ngular channel matric es is gi ven in [21]. JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 10 Lemma 6: The waterfilling op erator W F q ( Q − q ) in (9 ) can be equivalently written as WF q ( Q − q ) = h − H H qq R − 1 − q ( Q − q ) H qq − 1 i Q q , (58) wher e Q q is defined in (5). Comparing ( 10) with (58), it is straigh tforward to see that all the Nash eq uilibria of game G can b e alternatively obtained as the fixed-points of the mapping defined in (58 ) : Q ⋆ q = h − H H qq R − 1 − q ( Q ⋆ − q ) H qq − 1 i Q q , ∀ q ∈ Ω . (59) Remark 5 - Nonexpansive pr operty of the MIMO waterfilling operator . Thanks to the interp retation of MIMO waterfilling in (9) as a projecto r , one can obtain the following non expansiv e proper ty of the waterfilling operator that will be used in the next sectio n to deriv e the con traction pr operties o f the MIMO waterfilling mapping. Lemma 7: Given q ∈ Ω , let [ · ] Q q denote the matrix pr o- jection on to the co n vex set Q q with res p ect to the F r obeniu s norm, as d efined in (40). Th en , [ · ] Q q satisfies the follo wing nonexpansive pr o perty: [ X ] Q q − [ Y ] Q q F ≤ k X − Y k F , ∀ X , Y ∈ C n T q × n T q . (60) 2) Contraction pr op erty of MI MO multiuser waterfilling : Building on Lemmas 6 and 7, we de riv e now sufficient condition s for th e waterfilling mappin g to b e a con traction, under a proper nor m. Our result is the natur al extension of Theorem 3 to the MIMO case. As in the SISO case, we defin e first an approp riate block- maximum norm fo r the multiuser waterfilling mapp ing. Given WF ( Q ) = ( W F q ( Q − q )) q ∈ Ω : Q 7→ Q , (61) where Q = Q 1 × · · · × Q Q , with Q q and WF q ( Q − q ) defined in (5) and (58), respectiv e ly , we introdu ce the following block- maximum norm on C n × n , with n = n T 1 + . . . + n T Q , defined as [22] k WF ( Q ) k w F, block , max q ∈ Ω k WF q ( Q − q ) k F w q , (62) where k·k F is the Frobenius norm an d w , [ w 1 , . . . , w Q ] T > 0 is any positive weigh t vector . Finally , let S ∈ R Q × Q + be th e nonnegative matrix defined as [ S ] qr , ρ H H r q H − H qq H − 1 qq H r q , 0 , if r 6 = q , otherwise. (63) where ρ ( A ) deno tes the spectral ra dius 14 of A . Th e con - traction property of the waterfilling mapping is given in the following theo rem. 14 The spectral radius ρ ( A ) of the m atrix A is defined as ρ ( A ) , max {| λ | : λ ∈ σ ( A ) } , with σ ( A ) denoting the s pectru m of A [41]. Theor em 5 (Contraction pr o perty of mapping WF ): Given w , [ w 1 , . . . , w Q ] T > 0 , the mappin g WF defi ned in (61) is Lipschitz continuous on Q : WF ( Q (1) ) − WF ( Q (2) ) w F, block ≤ k S k w ∞ , mat × Q (1) − Q (2) w F, block , (64) ∀ Q (1) , Q (2) ∈ Q , w h er e k·k w F, block , k ·k w ∞ , mat and S are defined in (6 2), (20), and (63 ) , r e spectively , and Q , Q 1 × · · · × Q Q , with Q q given in (5). Furthermor e , if k S k w ∞ , mat < 1 , (65) then mappin g W F is a block -contractio n with mo dulus α = k S k w ∞ , mat . Pr oof: Th e pr oof of the th eorem in the gener al case of ar- bitrary ch annel ma trices is q uite inv olved [21]. Here, we focus only on the simpler case in which th e direct ch annel ma trices { H qq } q ∈ Ω are square and non singular . Und er this assump tion, accordin g to Lemma 6, each com ponent WF ( Q − q ) of the mapping WF can be rewritten as in (58 ). The p roof co nsists in showing that the m apping W F satisfies (64), with α = k S k w ∞ , mat . Giv en Q (1) = Q (1) q , . . . , Q (1) Q ∈ Q and Q (2) = Q (2) 1 , . . . , Q (2) Q ∈ Q , let define, for ea ch q ∈ Ω , e WF q , WF q Q (1) − q − WF q Q (2) − q F , (6 6) e q , Q (1) q − Q (2) q F . (67) Then, we ha ve: e WF q = − H H qq R − 1 q ( Q (1) − q ) H qq − 1 Q q − − H H qq R − 1 q ( Q (2) − q ) H qq − 1 Q q F (68) ≤ H H qq R − 1 q ( Q (1) − q ) H qq − 1 − H H qq R − 1 q ( Q (2) − q ) H qq − 1 F (69) = H − 1 qq X r 6 = q H r q Q (1) r − Q (2) r H H r q H − H qq F (70) ≤ X r 6 = q ρ H H r q H − H qq H − 1 qq H r q Q (1) r − Q (2) r F (71) , X r 6 = q [ S ] qr Q (1) r − Q (2) r F = X r 6 = q [ S ] qr e r , (72) ∀ Q (1) , Q (2) ∈ Q and ∀ q ∈ Ω , wh ere: (6 8) f ollows from (58) (Lemma 6); (69) follows from th e non expansive pr operty of the projector in the Frobenius no rm as given in (60) (Lemma 7); (70) follo ws from the n onsingu larity of th e channe l ma tri- ces { H qq } ; ( 71) follows from th e triang le inequality [ 41] and from [21] AXA H F ≤ λ max A H A k X k F , ( 73) JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 11 where X = X H and A ∈ C n × m ; an d (72) follows fro m the definition of matrix S in (63). Introd ucing the vectors e WF , [ e WF 1 , . . . , e WF Q ] T , and e , [ e 1 , . . . , e Q ] T , (74) with e WF q and e q defined in (66) and (67), respectiv ely , the set of inequalities in (7 2) can be rewritten in vector form as 0 ≤ e WF ≤ Se , ∀ Q (1) , Q (2) ∈ Q . (75) Using th e weig hted max imum norm k·k w ∞ , vec defined in (1 9) in combinatio n with (75), we ha ve k e WF k w ∞ , vec ≤ k Se k w ∞ , vec ≤ k S k w ∞ , mat k e k w ∞ , vec , (76) ∀ Q (1) , Q (2) ∈ Q and w > 0 , wh ere k·k w ∞ , mat is the matrix norm in duced by the vector norm k·k w ∞ , vec in (19) and defined in (20) [41]. Fi n ally , using (76) and (62), we ob tain, WF ( Q (1) ) − WF ( Q (2) ) w F, block = k e WF k w ∞ , vec ≤ k S k w ∞ , mat Q (1) − Q (2) w F, block , (77) ∀ Q (1) , Q (2) ∈ Q and ∀ w > 0 , which leads to a bloc k- contraction f or th e ma pping WF if k S k w ∞ , mat < 1 , implyin g condition (65). V . E X I S T E N C E A N D U N I Q U E N E S S O F T H E N E Using resu lts obta ined in th e previous section, we can now study game G and derive conditions for existence an d uniquen ess of the NE , as gi ven next. Theor em 6: Game G always admits a NE, for any set of channel matrices and transmit po wer of the u sers. Further- mor e, the NE is unique if ρ ( S ) < 1 , (C1) wher e S is defined in (63). Pr oof: According to the interpretation of the waterfilling mapping WF in (9) as a projector (cf. Lemma 6), the e x istence of a NE o f game G is guar anteed by the existence of a solution of the fixed-po int equa tion ( 59). Inv okin g Theor em 1(a) , the existence of a fixed- point fo llows from th e con tinuity of the waterfilling pr ojector (58) on Q , for any gi ven set of chann el matrices { H r q } r,q ∈ Ω (implied from the co ntinuity of th e projection operator [22, Proposition 3. 2c] and the contin uity of eac h R − 1 − q ( Q − q ) on Q − q 15 ), an d fro m the con vexity an d compactn ess of the joint admissible strategy set Q . 16 According to Theorem 1(b), a sufficient con dition for th e uniquen ess of the NE o f game G is th at the waterfilling mapping W F in (9) be a contr action with resp ect to some norm. It fo llows from Th eorem 5 that WF is a block- contraction if con dition (6 5) is satisfied for some w > 0 . 15 This result can be proved using [37, Theorem 10.7.1]. 16 Accordin g to [32, Theorem 1], the e xistence of a NE of game G can also be prov ed sho wing that the game is a conca ve game: 1) The set Q q of feasible strate gy profiles of each player q is compact and con vex; and 2) The payof f function of eac h player q is cont inuous in Q ∈ Q and con cave in Q q ∈ Q q , for any giv en Q − q ∈ Q − q (this follo ws from the conca vity of the log function [42]). Since S in (65) is a no nnegative matrix, there exists a positive vector w such that [22, Corollary 6.1] k S k w ∞ , mat < 1 ⇔ ρ ( S ) < 1 , (78) which proves the suffi cien cy of (C1). T o g iv e additional in sight into the ph ysical interpre tation of sufficient con ditions for th e un iqueness of the NE, we pr ovide the following corollar y o f Theorem 6 . Cor o llary 1: A sufficient co ndition for (C1) is give n by one of the two fo llowing set of conditions : 1 w q X r 6 = q ρ H H r q H − H qq H H qq H r q w r < 1 , ∀ q ∈ Ω , (C2) 1 w r X q 6 = r ρ H H r q H − H qq H H qq H r q w q < 1 , ∀ r ∈ Ω , (C3) wher e w , [ w 1 , . . . , w Q ] T is a positive vector . Remark 6 - Physical interpr etatio n of uniquen ess conditions. Lookin g at co nditions (C2)-( C3), it turns out, as expec ted, that the u niquene ss of a NE is ensured if th e inter ference amo ng the links is sufficiently small. Th e im portance of condition s (C2)-(C3) is that they quan tify how sma ll the inter ference must be to guaran tee th at the eq uilibrium is indeed u nique. Specifically , co ndition (C2) can be inter preted as a constraint on the max imum amount of inter ference that each receiver can tolerate, whereas (C3) introdu ces an upper bound on the max imum lev el o f interferen ce th at each transmitter is allowed to gen erate. This r esult agrees with the intu ition that, as the MUI beco mes negligible, the rate s of the users b ecome decoup led an d then the rate-maximiza tion p roblem in (4) fo r each user admits a u nique solution. Remark 7 - Special cases. Con ditions in Theorem 6 and Corollary 1 f or the uniqu eness of the NE c an be ap plied to arbitrary MIMO interference systems, 17 irrespective of th e specific structur e o f channel matr ices. Interestingly , most of the conditions k nown in the litera ture [7]-[15] f or the rate- maximization g ame in SISO fr eq uency-selective interference channels and OFDM transmission come naturally from (C1) as special cases. In fact, using th e T oeplitz a nd circula nt structure of the c hannel matrice s H r q = WD r q W H (cf. Section IV -A), m atrix S in th e u niqueness condition (C1), d efined in (63), reduces to matrix S max defined in (21), showing that our uniqu eness conditio n coincid es with those given in [19], [20] and enlarges those obtain ed in [7 ]-[11] and [13], [15]. Observe th at condition (C1), with S max defined in ( 21), can be furth er weakened by com puting the “ max ” over a subset of { 1 , . . . , N } , obtained f rom { 1 , . . . , N } by removing the subcarrier indexes where each user will never tran smit, for any set of channel realizations and in terference profile [ 18], [19]. An algorithm to com pute such a set is given in [18]. Recently , in [31], the authors studied the game G an d proved using [ 32, Theorem 2 .2] that the NE of the g ame is uniq ue 17 Recal l that here we have concentrate d on square nonsingul ar (direct) MIMO channe ls. Howe ver , conditi on (C1) can be generaliz ed to the ca se of rectangular channe l matrices [21]. JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 12 if the MUI at each r eceiv er q , measured by the interfer ence- to-noise ratios { P r /σ 2 q } r 6 = q where σ 2 q is the variance o f the thermal no ise at re ceiv er q , is smaller than a given unspe cified threshold. Differently from [31], o ur results provide a set of sufficient conditions that can be checked in practice, since they explicitly quantify ho w strong the MUI must be to guarantee the uniquen ess of the NE. V I . M I M O A S Y N C H RO N O U S I T E R AT I V E W AT E R FI L L I N G A L G O R I T H M According to th e framework developed in Section III, to reach the Nash e quilibria of game G , one can u se an instanc e of the totally asyn chrono us scheme o f [22] (cf. Section I II-B), based on the waterfilling map ping (9), called asynch ronou s Iterative W aterFilling Algorith m (IWF A) [21]. I n th e asyn - chrono us IWF A, all the u sers m aximize their own rate in a totally asynchr o nous way via the single user waterfilling solution (9). According to this asyn chrono us proced ure, some users are allowed to u pdate their strategy mor e freq uently than the oth ers, and they mig ht perfor m these u pdates using outdated infor mation o n the inte rference c aused by th e others. W e show in the following that, whatever the asynch ronou s mechanism is, such a pr ocedure conver ge s to a stable NE of the game, under the same sufficient cond itions gu aranteeing the uniquen ess of the equilibrium gi ven in Theorem 6. T o provide a formal de scription of the propo sed asyn- chrono us IWF A, we need the following prelimina ry defini- tions. W e assume, w .l.o. g., tha t the set of times at which one o r more u sers up date their strategies is the d iscrete set T = N + = { 0 , 1 , 2 , . . . } . Let Q ( n ) q denote the covariance matrix of the vector signal transmitted by user q at the n - th iteration, and let T q ⊆ T den ote th e set o f times n a t which Q ( n ) q is updated (thus, at tim e n / ∈ T q , Q ( n ) q is left unchan ged). Let τ q r ( n ) denote the mo st recen t time at which the in terference fr om user r is p erceived b y user q at the n - th iter ation (ob serve that τ q r ( n ) satisfies 0 ≤ τ q r ( n ) ≤ n ). Hence, if user q up dates his o wn covariance matr ix at the n - th iteration, then h e chooses h is op timal Q ( n ) q , according to (9), and using the inte rference le vel caused by Q ( τ q ( n )) − q , Q ( τ q 1 ( n )) 1 , . . . , Q ( τ q q − 1 ( n )) q − 1 , Q ( τ q q +1 ( n )) q +1 , . . . , Q ( τ q Q ( n )) Q . (79 ) The overall system is said to be totally asynchro nous if the following weak assumptions are satis fied fo r each q [22]: A1) 0 ≤ τ q r ( n ) ≤ n ; A2) lim k →∞ τ q r ( n k ) = + ∞ ; and A3) |T q | = ∞ ; wher e { n k } is a sequence of e lements in T q that tends to infinity . Assumption (A1)- (A3) are standar d in asynchro nous conver g ence th eory [22], and they ar e fu lfilled in any practical implemen tation. In fact, (A1 ) simp ly indicates that, in the curren t iteratio n n , each user q c an use only interferen ce vectors Q ( τ q ( n )) − q allocated by others in previous iterations (to preserve causality) . Assump tion (A2 ) states that, for any given iteration index n 1 , values of the compo nents of Q ( τ q ( n )) − q in (79) gen erated prior to n 1 , will n ot be used in th e up dates o f Q ( n ) q after a sufficiently long time n 2 ; this guaran tees that old info rmation is e ventually purged f rom the system. Finally , assumption (A3) indicates that no user fails to update his o wn strategy as time n goes on. Using the ab ove notation, the asynchronou s IWF A is for- mally described in Algorithm 1 . Algorithm 1: MIMO Asy nchronous IWF A Set n = 0 and Q (0) q = any feasible covariance matr ix; for n = 0 : N it Q ( n +1) q = ( WF q Q ( τ q ( n )) − q , if n ∈ T q , Q ( n ) q , other wise ; ∀ q ∈ Ω (80) end It follows direc tly fro m Theore ms 2 and 5 th at convergence of the algo rithm is g uaranteed under the fo llowing sufficient condition s. Theor em 7: Sup pose that con dition (C1) in Theo r em 6 is satisfied. Then, as N it → ∞ , the asyn chr on ous IWF A, described in Algorithm 1, co n verges to the u nique NE of game G for any set of feasible initial condition s a nd u pdating schedule. Remark 8 - G lobal c on ve r gence and r obustness o f the algo- rithm . Even thou gh the rate maximizatio n game G an d the consequen t waterfilling mapping (9) are non linear, condition (C1) guar antees th e global conver g ence of the asyn chrono us IWF A. Ob serve that Algorith m 1 contains as specia l cases a p lethora of algorith ms, each one obtained b y a possible choice of the scheduling of th e users in the updating proce dure (i.e., the param eters { τ q r ( n ) } and {T q } ). T wo special cases are th e sequential and the simultaneo us MIMO IWF A, where the user s up date their own strategies seque ntially and simulta- neously , respectively . The importan t result stated in Th eorem 7 is that all th e algorithms resulting as special cases o f the asynchro nous IWF A are guarantee d to reach the unique NE of the gam e, und er the same set of conver g ence co nditions (provided that (A1)-(A3 ) ar e satisfied) , sinc e cond itions in (C1) do not depend on the particular choice of {T q } and { τ q r ( n ) } . Remark 9 - Distributed nature of the algorithm. Sin ce the asynchro nous IWF A is based on the w ater filling solution (9), it can be im plemented in a distributed way , where each user , to maximize h is own rate, only needs to measure the cov arian ce matrix of th e overall interfer ence-plus-n oise and waterfill over this m atrix. More interestingly , accord ing to the async hrono us scheme, the users may u pdate the ir strategies u sing a poten- tially outdated version of the interferenc e and, further more, some users are allowed to update their covariance matrix more o ften than othe rs, without affecting the conver g ence o f the a lgorithm. These f eatures strongly relax th e co nstraints on th e sy nchron ization of the users’ update s with respect to those imposed , for examp le, by the simu ltaneous or sequential updating schemes. Remark 10 - W ell- known cases. Th e M IMO asynchro nous IWF A, described in Algorithm 1 is the natural gener alization JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 13 of the asyn chrono us I WF A propo sed in [20], to solve the rate-maxim ization game in Gau ssian SIS O fr eq uency-selective parallel interferen ce channels . Algo rithm in [20] can be in fact obtained directly fro m Algorith m 1 u sing the following equiv- alences: Q q ⇔ p q , WF q ( · ) ⇔ wf q ( · ) , an d Q q ⇔ P q , where WF q ( · ) , wf q ( · ) , Q q , and P q are d efined in (9), (16), ( 5), an d (1 4), r espectiv ely . Similarly , th e well- known sequential IWF A [7]-[14], [19] and simultaneou s IWF A [14]- [16], [19] proposed in the literature are special cases o f Algorithm 1, using th e above equivalences. V I I . N U M E R I C A L R E S U LT S In this section , we first pr ovide some nu merical results illustrating the benefits o f MIMO tr ansceiv er s in the mu ltiuser context. Then, we compar e some of the propo sed algorithms in terms of co n vergence speed . Example 1 − MI MO vs. SISO. MI MO systems ha ve sho wn great p otential f or providing high spectral efficiency in both isolated, single-user , wireless lin ks without inter ference o r multiple access and b roadcast channels. Here we quantifies, by simulations, this potential gain f or M IMO interference systems. In Fig ure 1, we p lot the sum- rate of a two-user frequen cy-selectiv e MIMO system as a function of the inter- pair distance among th e links, for different numb er of trans- mit/receive antenn as. The rate curves are averaged over 50 0 indepen dent chan nel realization s, whose taps are simulated as i.i.d. Gau ssian rand om variables with ze ro mean an d unit variance. For the sake o f simp licity , the system is assumed to be symmetric, i.e., the transmitters ha ve the same power budget and the interferen ce link s are a t the same d istance (i.e., d r q = d qr , ∀ q , r ) , so that the cross channel gains a re compara ble in average sense. The p ath loss γ is assumed to be γ = 2 . 5 . From the figure o ne infer that, as fo r isolated single-user systems or mu ltiple access/broadcast chan nels, also in MIMO interferen ce chann els, increasing the num ber of antenn as at both th e tran smitter and the r eceiv er side leads to a better perfor mance. T he interesting r esult, comin g f rom Figure 1, is th at the incremental gain du e to the use of multiple tran s- mit/receive an tennas is almost indepen dent of the in terference lev el in the system, since the MIMO (incre mental) gains in the high -interfere nce case (small values o f d r q /d qq ) almost coincide with the corre sponding (incremental) gains o btained in the low-interfer ence case (large values of d r q /d qq ), at least for the system simulated in Figure 1. This desired property is due to the fact that the MIMO channel p rovides mo re degree s of fre edom for each user than those av ailable in the SISO channel, that can be e x plored to find out the best partition of the av ailable resour ces for each user, possibly cancelling the MUI. Example 2 − S equential vs. simulta neous IWF A. In Figure 2 we compa re the performance o f the sequential and simultane- ous IWF A, in term s of conv e rgence speed, fo r a given set o f MIMO chann el realization s. W e con sider a cellular network composed by 7 (regular ) h exagonal ce lls, sharing the same spectrum. Hence, simultaneou s transmissions of different cells can interfere with each other . T he Base Stations (BS) and the 1 2 3 4 5 6 7 8 0 2 4 6 8 10 12 14 16 18 Users’ Sum−Rate n T =n R =6 n T =n R =4 n T =n R =2 n T =n R =1 d rq / d qq Fig. 1. Sum-Rate of the users versus d r q /d qq ; d r q = d qr , d r r = d qq = 1 , r = 1 , 2 , Q = 2 , γ = 2 . 5 , P 1 /σ 2 1 = P 2 /σ 2 2 = 5 dB, L h = 6 , N = 16 . Mobile T erminals (MT ) are eq uipped with 4 an tennas. For the sake of simplicity , we assume that in each cell there is only one active link, co rrespon ding to the transmission from the BS (placed at the cen ter of the cell) to a MT placed in a corne r o f the cell. Acco rding to this geome try , each MT receives an useful signa l that is compa rable in av er age sense with th e inter ference signal transmitted by the BSs of two adjacent cells. The overall network is thus stitched o ut o f eight 4 × 4 MI MO inter ference wideban d channels, ac cording to ( 1). In Figure 2, we show the rate evolution of the links o f three cells corresponding to the sequential IWF A and simultaneous IWF A as a function of the iter ation index n . T o make the figure not excessiv ely overcrowded, we plot only the curves of 3 out o f 8 links. As expected, the sequential IWF A is slower than the s im ultaneous IWF A, especially if the number of acti ve links Q is large, since each u ser is forced to wait for all the users scheduled in ad vance, bef ore updating his own power allocation. The same qu alitati ve beh avior has been ob served changin g the chan nel re alizations and the num ber of antenn as. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 iteration index Users’ Rates Sequential IWFA Simultaneous IWFA link #6 link #1 link #2 Fig. 2. Rates of the links versus iterations: sequential IWF A (dashed line curves) and simultaneous I WF A (solid li ne curves); Q = 8 , γ = 2 . 5 , P q /σ 2 q = 5 dB, ∀ q ∈ Ω , L h = 6 , N = 16 . JOURNAL OF SELECTE D AREAS IN COMMUNICA TIONS, VOL. ?, NO. ? , SE PTEMBER 2008 14 V I I I . C O N C L U S I O N S In this paper we have considered the competiti ve maximization of mutual information in non cooper ati ve interfering networks in a fully distributed fashion, based on game theory . W e have provided a unified vie w of ma in results ob tained in the pa st seven years, sho wing that the proposed app roaches, ev en apparently different, c an b e un ified by o ur inter pretation of the watefilling solutio n as a prop er projection onto a polyhed ral set. Building on this interpretatio n, we have shown how to apply standar d results from fixed-p oint and con traction theory to the rate maxim ization game in SISO fre quency- selecti ve channels, in order to obtain a unified set of sufficient condition s guaranteein g th e uniq ueness of the N E an d the conv ergen ce of totally asynchron ous distributed algorithms. The propo sed f ramework h as also been g eneralized to the (square) MIMO case. The obtained results ar e the natu ral generalizatio n of those obtained in the SI SO case. R E F E R E N C E S [1] T . Starr , J. M. Ciof fi, and P . J. Silverman, Understanding Digita l Subscriber Line T echnolo gy , Prentice Hall, NJ, 1999. [2] A. J. Goldsmith and S. B. Wic ker , “Design Chal lenges for Ener gy- Constrai ned Ad Hoc Wir eless Netw orks, ” IEEE W irele ss Communic a- tions Magazine , vol. 9, no. 4, pp. 8-27, August 2002. [3] I. F . Akyil diz an d X . W ang, “ A Surve y on W ireless Mesh Net- works, ” IEEE Communic ations Magazine , vol . 43, no. 9, pp. 23-30, September 2005. [4] S. Haykin, “Cogniti ve Radio: Brain-Empo wered Wi reless Communica- tions, ” IEEE Jour . on Selected Areas in Communication s , vol. 23, no. 2, pp. 201-220, February 2005. [5] M. J. Osborne and A. Rubinstei n, A Course in Game Theory , MIT Press, 1994. [6] J. P . Aubin, Mat hematical Method for Game and Economic Theory , Else vier , Amsterdam, 1980. [7] W . Y u, G. Ginis, and J. M. Cioffi, “Distrib uted Multiuser Power Control for Digital Subscriber Lines, ” IEEE J our . on Selecte d Ar eas in Communicat ions , vol. 20, no. 5, pp. 1105-1115, June 2002. [8] S. T . Chung, S. J. Kim, J. Lee, and J. M. Ciof fi , “ A Game-the oretic Approach to Po wer Allocation in Frequency-se lecti ve Gaussian Inter - ference Channels, ” in Proc . of the 2003 IEEE Internati onal Symposium on Information Theory (ISIT 2003) , p. 316, June 2003. [9] N. Y amashita and Z . Q. Luo, “ A Nonlinear Complementarity Approach to Multiu s er Power Control for Digital Subscriber Lines, ” Optimization Methods and Softwar e, vol. 19, no. 5, pp. 633–652, Octobe r 2004. [10] G. Scutari, S. Barbarossa, and D. Ludovici, “On the Maximum Achie v- able Rates in Wirel ess Meshed Network s: Cent ralized versus Decen- traliz ed solutions, ”in Proc . of the 2004 IEEE Int. Conf. on A coustic s, Speec h, and Signal Proce ss ing (ICASSP-2004) , May 2004. [11] G. Scutari, S. Barbarossa, and D. Ludovici , “Cooperat ion Di versity in Multihop Wire less Networks Using Opportunist ic Dri ven Multipl e Access, ” in Proc. of the 2003 IEEE W orkshop on Sig. Proc . Advances in W ir eless Comm., (SP A WC-2003) , pp. 170-174, June 2003. [12] Z.-Q. Luo and J. -S. Pang, “ Analysis of Iterat ive W aterfilling Algorithm for Multiuser Powe r Control in Digital Subscriber Lines, ” EURASIP J our . on Applied Signal P r ocessing , May 2006. [13] R. E tkin, A. Parekh, and D. Tse, “Spect rum Sharin g for Unlicensed Bands, ” in P r oc. of the A llerton Confer ence on Commuicat ion, Contr ol, and Computing , Monticel lo, IL , September 28-30, 2005. [14] G. Scutari, Competiti on and Cooper ation in W ire less Communicatio n Network s , PhD. Dissert ation, Uni versit y of Rome, “La Sapienza”, Nov ember 2004. [15] R. Cendrillon, J. Huang, M. Chi ang and M. Moonen, “ Autonomous Spectrum Balanc ing for Digita l Subscriber Lines, ” IEE E T rans. on Signal Pr ocessing , vol. 55, no. 8, p. 4241–4257, Aug. 2007. [16] K. W . Shum, K.-K. Leung, C. W . Sung, “Con ver gence of Iterati ve W aterfilling Algorithm for Gaussian Interferen ce Channels, ” IEEE Jour . on Selecte d Area in Communicat ions , vol. 25, no 6, pp. 1091-1100, Aug. 2007. [17] G. Scutari , D. P . Pal omar, and Sergio Barbarossa, “Di stributed T otally Asynchronous Iterati ve W aterfilli ng for Wide band Interfere nce Channel with Ti m e/Frequ ency Offset, ” in Proc. of the IEEE Int. Conf. on Acoustics, Speech, and Signal Proce s sing (ICASSP) , Honolulu, Haw aii, USA, April 15-20, 2007. [18] G. Scutari, D. P . Palomar , and S. Barbarossa, “Optimal L inear Precoding Strate gies for Wideba nd Non-Coope rativ e Systems based on Game Theory-Pa rt I: Nash Equilibria, ” IEEE Tr ans. on Signal P r ocessing, V ol. 56, no. 3, pp. 1230-1249, March 2008. [19] G. Scutari, D. P . Palomar , and S. Barbarossa, “Optimal L inear Precoding Strate gies for Wideba nd Non-Coope rativ e Systems based on Game Theory-Pa rt II: Algorithms, ” IE EE T rans. on Si gnal Pr ocessing, , V ol. 56, no. 3, pp. 1250-1267, March 2008. See also Proc. of . IEEE Internati onal Symposium on Informatio n Theory (ISIT) , Seattl e, W A, USA, July 9-14, 2006. [20] G. Scutari, D. P . Palomar , and S. Barbarossa, “ Asynchrono us Iterati ve W aterfilling for Gaussian Frequency-Se lecti ve Interferenc e Channels, ” to appear on IEE E T rans. on Information Theory , July 2008. See also Proc. IEEE W orkshop on Sign al Proc . Advances in W ir eless Commun. (SP A WC 2006) , Cannes, France , July 2-5, 2006; and Proc. of IEE E Informati on Theory an d Applications (IT A) W orkshop , San Diego, CA, USA, Jan. 29 - Feb . 2, 2007. [21] G. Scutari, D. P . Palomar , and S. Barbarossa, “The MIMO Iterati ve W aterfilling Algorithm, ” submitted to IEEE T rans. on Signal Pro cessing . See also Proc. of the IEEE Int. Conf . on Acoustics, Speech, and Signal Pr ocessing (ICASSP) , Las V egas, US A, March 30 - April 4, 2008. [22] D. P Be rtsekas and J.N. Tsitsiklis, P arallel and Distribute d Computa- tion: Numerical Methods , Athena Scientific , 2nd Ed., 1989. [23] R. D . Y ates, “ A Frame work for Uplink Powe r Control in Cellul ar Radio Systems, ” IEEE Jour . on Select ed Area in Communication s , vol. 13, no 7, pp. 1341-1347, September 1995. [24] J. M. Orte ga and W . C. Rhei nboldt, Iterati ve Solut ion of Nonli near Equations in Sev eral V ariable s , SIAM Ed., 2000. [25] R. P . Agarwal, M. Meehan, and D. O’ Regan, F ixed P oint Theory and Applicat ion , ”Cambridge Univ ersity Press, 2001. [26] S. N. Elaydi, An Intr oduction to Differ ence Equations , Springer , 3rd ed., 2005. [27] E. Larsson and E. Jorswieck, “Competit ion and Colla boration on the MISO Interfe rence Channel, ” in Proc . of Allerton Confer ence on Com- municati on, Contro l, and Computing , 2 007 (inv ited paper). [28] S. Y e and R. S. Blum, “Opt imized Signali ng for MIMO Interf erence Systems With Feedback, ” IEEE T rans. on Signal Pr ocessing , vol. 51, no. 11, pp. 2839-2848, Nove mber 2003. [29] M. F . Demirkol and M. A. Ingram, “Power -Controlled Capacity for Interfer ing MIMO Links, ” in Pro c. of the IEEE V ehicular T echnolo gy Confer ence (V TC 2001), 2001. [30] C. Liang and K. R. Dandeka r, “Po wer Manage m ent in MIMO Ad Hoc N etw orks: A Game-Theoretic Approach, ” IEEE T rans. on W ire less Communicat ions , vol. 6, no. 4, pp. 2866-2882, April 2007. [31] G. Arslan, M. Fatih Demirk ol and Y . Song, “Equilibrium ef ficiency improv ement in MIMO int erference systems: a decentr alized stream control approach, ” IEEE T ransaction on W ireless Communicati ons , vol. 6, no. 8, pp. 2984–2993, August 2007. [32] J. Rosen, “Existence and Uniqueness of Equilibri um P oints for Concav e n-Person Games, ” Econometrica , vol. 33, no. 3, pp. 520–534, July 1965. [33] T . M. Cov er and J. A. Thomas, E lement s of Information Theory , J ohn W iley and Sons, 1991. [34] J. G. David Forney and M. V . E yuboglu, “Combined Equalizati on and Coding Using Precoding, ” IEEE Comm. Magazine , vol. 29, no. 12, pp. 25–34, Dec. 1991. [35] H. K. Khalil, Nonlinea r Sy stems , Pren tice H all, Thir d Ed., 2002. [36] D. Liberzon, Switc hing in Systems and Contro l , Springer , 1993. [37] S. L. Campbell and C.D. Meye r, Generalized In verse of Linear T rans- formations, Dove r Publica tions, 1991. [38] D. S. Bernst ein, Matrix Mathemat ics: Theory , F acts, and F ormulas with Applicatio n to Linear Systems Theory , Princet on Univ ersity Press, February 22, 2005. [39] R. W . Cottle, J.-S. Pang, and R. E. Stone, The Linea r Complementarity Problem , Academic Press (Cambridge 1992). [40] F . Facc hinei and J.-S. Pang, Fi nite-Dimensional V ariational Inequali ties and Complement arity Proble ms , Springer , 2000. [41] R. A. Horn and C. R. Johnson, Matrix Analysis , Cambridge Univ . Press, 1985. [42] S. Boyd and L. V andenbe rghe, Con vex Opti mization , Cambridge U ni- versi ty Press, 2003.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment