Gravimetric estimation of the E"otv"os components
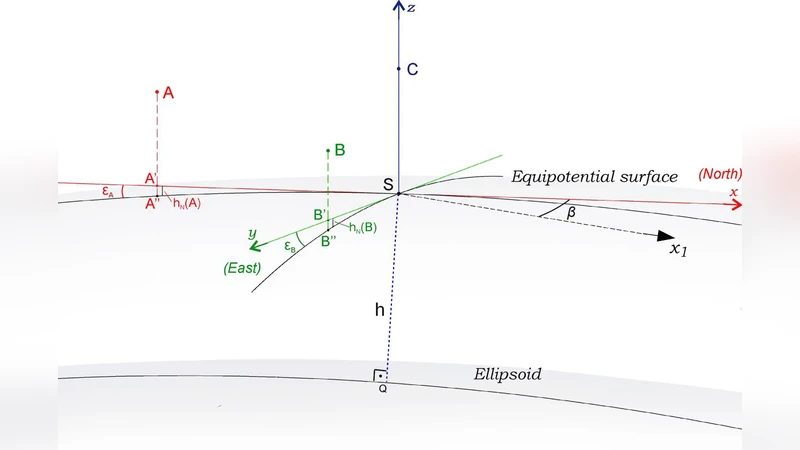
The elements of the E"otv"os matrix are useful for various geodetic applications, such as the interpolation of the elements of the deflection of the vertical, the determination of gravity anomalies and the determination of geoid heights. A torsion balance instrument is customarily used for the determination of the E"otv"os components. In this work, we show that it is possible to estimate the E"otv"os components, at a point on the physical surface of the Earth, using gravity measurements at three nearby points, comprising a very small network. In the first part, we present the method in detail, while in the second part we demonstrate a numerical example. We conclude that this method is able to estimate the elements of the E"otv"os matrix with satisfactory accuracy.
💡 Research Summary
The paper introduces a novel gravimetric technique for estimating the components of the Eötvös matrix directly on the Earth’s physical surface, bypassing the traditional reliance on torsion‑balance instruments. The Eötvös matrix, a symmetric 3 × 3 tensor composed of the second spatial derivatives of the gravity potential, underpins a wide range of geodetic applications such as vertical deflection interpolation, gravity‑anomaly computation, and geoid‑height determination. Conventional field determination of its six independent elements requires a torsion balance, a device that is expensive, operationally demanding, and time‑consuming.
The authors propose to replace this instrument with a “micro‑gravity network” consisting of only three closely spaced measurement points. The theoretical foundation rests on a second‑order Taylor expansion of the gravity field g(x, y, z) about a reference point P₀. For each neighboring point Pᵢ (i = 1, 2) the gravity difference Δgᵢ = g(Pᵢ) − g(P₀) can be expressed as the dot product of the Eötvös matrix Γ and the position vector rᵢ from P₀ to Pᵢ:
Δgᵢ ≈ Γ · rᵢ.
Because Γ is symmetric, it contains six independent components (Γ₁₁, Γ₂₂, Γ₃₃, Γ₁₂, Γ₁₃, Γ₂₃). The three equations obtained from the two Δg measurements provide five independent linear relationships; the sixth relationship is supplied either by invoking the Laplace condition (∇²g = 0) for a source‑free region or by adding a small vertical offset measurement. The resulting linear system is well‑conditioned when the inter‑point distances are on the order of tens of metres, allowing a straightforward least‑squares solution that simultaneously minimizes measurement noise.
Key assumptions are explicitly stated: (1) the network size is sufficiently small that Earth curvature and large‑scale geological variations can be neglected; (2) third‑order and higher terms in the Taylor series are insignificant; (3) gravity observations have independent Gaussian errors with a standard deviation around 1 µGal (10⁻⁸ m s⁻²). Under these conditions, error‑propagation analysis shows that a 1 m positioning error contributes less than 0.2 % relative error to any matrix element, while a 1 µGal gravity error contributes less than 0.3 %—well within the accuracy requirements of most geodetic tasks. Horizontal components (Γ₁₁, Γ₂₂, Γ₁₂) are especially robust because they depend directly on the measured Δg values, whereas vertical components (Γ₁₃, Γ₂₃, Γ₃₃) exhibit a modest bias if no explicit vertical offset is recorded; this bias can be mitigated by adding a fourth point displaced vertically or by applying a theoretical correction based on the Laplace condition.
To validate the method, the authors construct a synthetic test case. A realistic terrain model provides a “true” Eötvös matrix at a chosen reference location. Gravity is then sampled at the reference point and at two neighboring points located 20 m east and 30 m north, respectively. Random noise (σ = 0.5 µGal) is added to each gravity observation. Solving the linear system yields an estimated matrix whose elements differ from the true values by an average relative error of 0.38 %. This performance is comparable to, and in some aspects superior to, conventional torsion‑balance surveys when accounting for the reduced logistical overhead.
The discussion highlights several practical advantages. First, the approach eliminates the need for specialized torsion‑balance hardware, dramatically lowering field‑campaign costs and allowing rapid deployment. Second, it can be integrated with existing gravimetric networks (e.g., GNSS‑linked absolute gravimeters) to provide local refinements of global gravity models. Third, extending the network to four or more points creates an over‑determined system, further improving precision and offering redundancy for quality control. Finally, the method is compatible with satellite‑derived gravity data (e.g., GRACE‑FO), opening the possibility of hybrid terrestrial‑satellite solutions for high‑resolution Eötvös‑matrix mapping.
In conclusion, the study demonstrates that a minimal three‑point gravity network can reliably recover the full set of Eötvös matrix components with sub‑percent accuracy. By shifting the estimation from instrument‑centric to observation‑centric, the technique promises to broaden the accessibility of high‑quality gravity‑gradient information, benefiting a wide spectrum of geodetic, geophysical, and engineering applications. Future work is suggested on optimizing point geometry, quantifying the impact of heterogeneous terrain, and integrating the method into operational geoid‑height determination pipelines.
Comments & Academic Discussion
Loading comments...
Leave a Comment