On the Construction of Safe Controllable Regions for Affine Systems with Applications to Robotics
This paper studies the problem of constructing in-block controllable (IBC) regions for affine systems. That is, we are concerned with constructing regions in the state space of affine systems such that all the states in the interior of the region are mutually accessible through the region’s interior by applying uniformly bounded inputs. We first show that existing results for checking in-block controllability on given polytopic regions cannot be easily extended to address the question of constructing IBC regions. We then explore the geometry of the problem to provide a computationally efficient algorithm for constructing IBC regions. We also prove the soundness of the algorithm. We then use the proposed algorithm to construct safe speed profiles for different robotic systems, including fully-actuated robots, ground robots modeled as unicycles with acceleration limits, and unmanned aerial vehicles (UAVs). Finally, we present several experimental results on UAVs to verify the effectiveness of the proposed algorithm. For instance, we use the proposed algorithm for real-time collision avoidance for UAVs.
💡 Research Summary
**
The paper addresses the problem of constructing in‑block controllable (IBC) regions for affine control systems, a concept that captures Kalman‑type controllability while explicitly respecting hard state constraints and bounded inputs. An IBC region X ⊂ ℝⁿ is a polytope whose interior X° has the property that any two interior points can be connected by a trajectory that stays inside X° and uses inputs whose magnitude never exceeds a prescribed bound M. Existing work (Helwa & Caines, 2014) provides necessary and sufficient conditions for checking IBC on a given polytope: one solves a linear program (LP) at each vertex to verify that the vector field points inward with respect to every facet. While this verification is computationally cheap, the design problem—finding the largest polytope that satisfies the IBC conditions—leads to bilinear matrix inequalities (BMIs), which are NP‑hard and impractical for high‑dimensional systems.
To overcome this difficulty, the authors develop a purely geometric, LP‑based algorithm that avoids BMIs altogether. The key insight is to relate IBC to the classic “control‑to‑facet” (or reach‑control) problem: for a given facet Fᵢ with outward normal hᵢ, one asks whether there exists a bounded input u such that hᵢ·(Ax+Bu) ≤ 0 holds for all x on that facet. This condition can be checked by a single LP per facet. If the condition fails, the facet cannot be traversed under the input limits, and therefore must be either removed or shifted inward. By iteratively applying this test to all facets, the algorithm progressively shrinks the polytope until every remaining facet is traversable. The process terminates after a finite number of steps because each iteration eliminates at least one facet or moves it strictly inward, guaranteeing a monotone decrease in volume.
The algorithm proceeds as follows:
- Initialize with a large safety polytope X₀ derived from physical workspace limits, speed limits, and other hard constraints.
- Facet verification: for each facet Fᵢ solve the LP
minimize ‖u‖ subject to hᵢ·(Ax+Bu) ≤ 0, ‖u‖ ≤ M.
If feasible, the facet is marked “passable.” - Facet removal/translation: non‑passable facets are either discarded (if they lie on the boundary of the original safety set) or translated inward by a small amount δ along hᵢ, creating a new facet Fᵢ′.
- Update polytope: recompute the polytope X₁ as the intersection of the remaining/shifted half‑spaces.
- Iterate steps 2‑4 until all facets are passable. The resulting polytope X* is guaranteed to be IBC.
The authors prove two main results. First, the soundness theorem shows that any polytope produced by the algorithm indeed satisfies the IBC definition; the proof relies on the fact that the interior of the new polytope is a subset of the original, and the inward‑pointing condition guarantees the existence of admissible controls that keep trajectories inside. Second, a convergence theorem guarantees termination after a finite number of iterations because each iteration strictly reduces the number of facets or the polytope’s volume.
A particularly favorable scenario occurs when the number of inputs m is at least half the state dimension n (i.e., m ≥ n/2). In this regime the image of the input matrix B covers a sufficiently large subspace, making the intersection C(x)∩Im(B) non‑empty for most points, which in turn increases the likelihood that each facet passes the LP test. Consequently, the algorithm often terminates after only a few iterations for such systems.
The paper then demonstrates the practical relevance of the method on three robotic platforms:
-
Fully‑actuated robot arms: The state comprises joint positions and velocities; inputs are joint torques bounded by motor limits. Applying the algorithm yields, for each joint configuration, a safe velocity interval. These intervals constitute a safe speed profile that can be used by higher‑level planners to guarantee that any commanded trajectory remains feasible and collision‑free.
-
Ground robots modeled as unicycles with acceleration limits: The state includes planar position and velocity; the control input is bounded acceleration. The algorithm produces, for each planar location, a feasible speed region (often an ellipse) that respects both the workspace boundary and the acceleration constraints. This enables safe speed scheduling and dynamic obstacle avoidance.
-
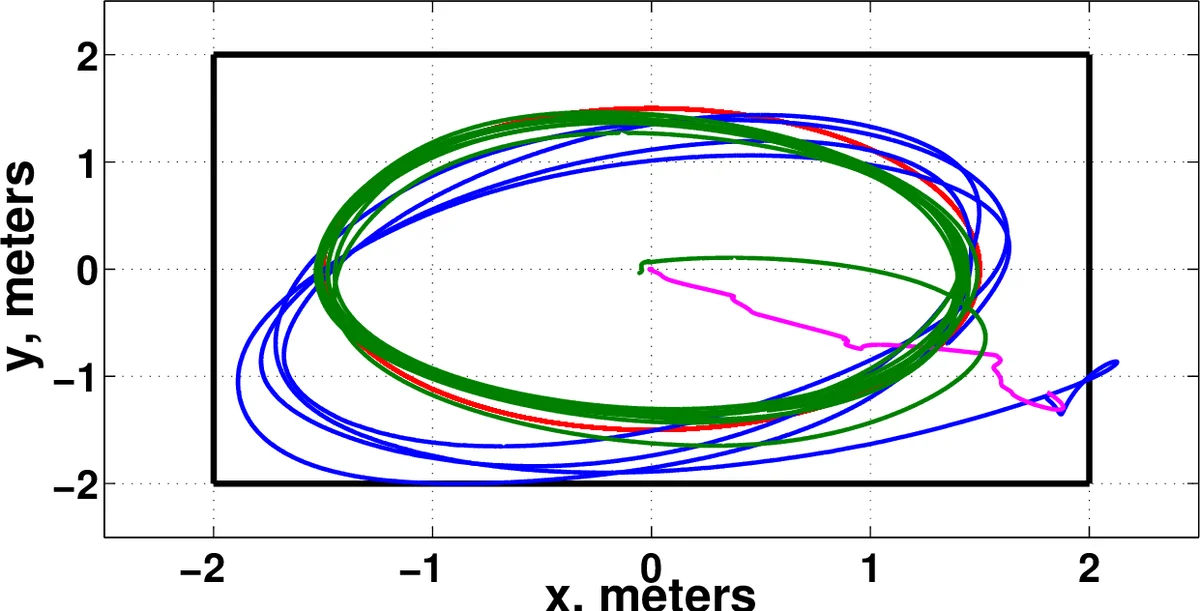
Unmanned aerial vehicles (UAVs): The state is 3‑D position and velocity (six dimensions); inputs are bounded thrust vectors. By constructing a polytope in the combined position‑velocity space, the method yields a safe speed envelope for every point in the flight corridor. The authors integrate this envelope into a real‑time collision‑avoidance controller. In hardware experiments with four quadrotors flying in a confined indoor arena, each UAV respects its speed envelope while dynamically re‑routing to avoid collisions, demonstrating that the IBC‑based envelopes are both conservative enough for safety and large enough to permit agile maneuvers.
Simulation results for the robot arm and unicycle confirm that trajectories generated under the safe speed profiles never violate actuator limits or workspace boundaries, and that the controllers remain smooth (no abrupt acceleration spikes). The UAV experiments further validate that the algorithm can be executed offline to generate the envelopes, while the online controller simply queries the pre‑computed envelope, achieving real‑time performance.
In the concluding discussion, the authors emphasize that the proposed geometric algorithm provides a tractable, provably correct way to design safe controllable regions, bridging a gap between safety verification (checking a given set) and controller synthesis (ensuring feasibility of motion plans). They note that the method naturally extends to hierarchical control of piecewise‑affine hybrid systems, where each region of a state‑space partition can be made IBC, enabling systematic synthesis of high‑level logic and low‑level continuous controllers. Future work is suggested in three directions: (i) extending the approach to nonlinear or switched systems via local linearizations, (ii) jointly designing IBC regions for multi‑robot teams to guarantee collective safety, and (iii) integrating learning‑based models to adapt the IBC regions online as system parameters change.
Overall, the paper makes a solid contribution by turning the abstract notion of in‑block controllability into a practical design tool, backed by rigorous proofs, an efficient algorithm, and convincing experimental validation on real robotic platforms.
Comments & Academic Discussion
Loading comments...
Leave a Comment