A Constraint-Handling Technique for Genetic Algorithms using a Violation Factor
Over the years, several meta-heuristic algorithms were proposed and are now emerging as common methods for constrained optimization problems. Among them, genetic algorithms (GA’s) shine as popular evolutionary algorithms (EA’s) in engineering optimization. Most engineering design problems are difficult to resolve with conventional optimization algorithms because they are highly nonlinear and contain constraints. In order to handle these constraints, the most common technique is to apply penalty functions. The major drawback is that they require tuning of parameters, which can be very challenging. In this paper, we present a constraint-handling technique for GA’s solely using the violation factor, called VCH (Violation Constraint-Handling) method. Several benchmark problems from the literature are examined. The VCH technique was able to provide a consistent performance and match results from other GA-based techniques.
💡 Research Summary
The paper addresses a fundamental difficulty in applying genetic algorithms (GAs) to constrained engineering design problems: the reliance on penalty functions that require careful tuning of penalty parameters. While penalty methods—both static and dynamic—are the most common way to transform a constrained problem into an unconstrained one, the choice of penalty coefficients strongly influences the search behavior. Over‑penalization can trap the population inside the feasible region, preventing exploration of potentially better solutions near the boundary, whereas under‑penalization allows the algorithm to wander in infeasible space, leading to poor convergence. Moreover, determining appropriate penalty values often demands extensive empirical testing, which is impractical for real‑world applications.
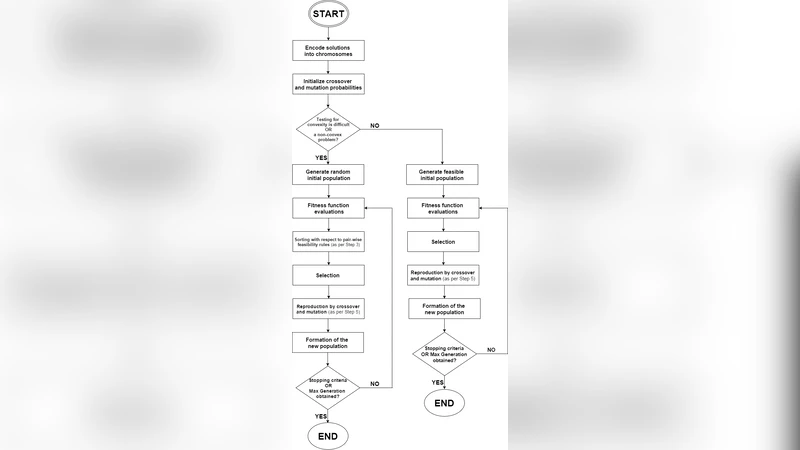
To overcome these drawbacks, the authors propose a parameter‑free constraint‑handling technique called VCH (Violation Constraint‑Handling). The core idea is to replace penalty terms with a direct comparison of infeasibility based on two metrics: (1) the number of violated constraints (NV) and (2) the total magnitude of violation (CV). The algorithm proceeds as follows:
- Initialization – Real‑coded chromosomes are generated uniformly within variable bounds. Equality constraints are converted to inequalities using a small tolerance ε.
- Evaluation – For each individual, the objective function f(x) is computed, and all constraints are normalized. The normalized violation for each constraint g_k(x) is calculated, and CV = Σ max(0, g_k) is obtained. NV is defined as the percentage of constraints that are violated.
- Sorting & Selection – The population is split into feasible (V0) and infeasible (V1) groups. Feasible individuals are sorted by objective value (ascending for minimization). Infeasible individuals are sorted using a hierarchy of rules: (a) a feasible individual always dominates an infeasible one; (b) if both are feasible, the one with better fitness wins; (c) if both are infeasible, the one with smaller NV wins; (d) if NV is equal, the one with smaller CV wins.
- Elitism – The top Nelite individuals (the best from the sorted list) are copied unchanged to the next generation.
- Genetic Operators – The remaining population undergoes crossover (Ncross individuals) and mutation (Nmut individuals) using standard real‑coded GA operators.
Because the selection mechanism directly incorporates constraint violation information, no external penalty coefficients are needed. The method therefore preserves the “natural selection” philosophy of evolutionary algorithms: individuals are judged solely by their feasibility and fitness, without artificial scaling.
The authors validate VCH on several benchmark constrained optimization problems (commonly labeled G01–G05) and on a realistic engineering design case. For each test, they compare VCH‑augmented GA against GA variants that use static penalties, dynamic penalties, co‑evolutionary penalty adaptation, and death‑penalty strategies. Performance metrics include best‑found objective value, average best value over multiple runs, standard deviation, and convergence speed. Results show that VCH consistently matches or outperforms the penalty‑based approaches. In particular, VCH reaches feasible regions more quickly, exhibits lower variance across runs, and avoids the need for any parameter tuning.
The paper also discusses limitations. The normalization of constraints assumes comparable scales; large disparities may diminish the effectiveness of NV and CV as discrimination criteria. Moreover, the binary feasibility rule (feasible beats infeasible) may be too strict for problems where near‑feasible solutions provide valuable gradient information. The authors suggest future work on adaptive scaling of constraint violations, extension to multi‑objective problems, and hybridization with other meta‑heuristics such as particle swarm optimization or differential evolution.
In conclusion, the VCH technique offers a simple, robust, and parameter‑free alternative to traditional penalty methods for handling constraints in genetic algorithms. By leveraging direct violation metrics and a clear feasibility‑based ranking, it maintains the exploratory power of GAs while ensuring convergence to high‑quality feasible solutions, making it attractive for a wide range of engineering optimization tasks.
Comments & Academic Discussion
Loading comments...
Leave a Comment