Decentralized Traffic Management Strategies for Sensor-Enabled Cars
Traffic Congestions and accidents are major concerns in today’s transportation systems. This thesis investigates how to optimize traffic flow on highways, in particular for merging situations such as intersections where a ramp leads onto the highway. In our work, cars are equipped with sensors that can detect distance to neighboring cars, and communicate their velocity and acceleration readings with one another. Sensor-enabled cars can locally exchange sensed information about the traffic and adapt their behavior much earlier than regular cars. We propose proactive algorithms for merging different streams of sensor-enabled cars into a single stream. A proactive merging algorithm decouples the decision point from the actual merging point. Sensor-enabled cars allow us to decide where and when a car merges before it arrives at the actual merging point. This leads to a significant improvement in traffic flow as velocities can be adjusted appropriately. We compare proactive merging algorithms against the conventional priority-based merging algorithm in a controlled simulation environment. Experiment results show that proactive merging algorithms outperform the priority-based merging algorithm in terms of flow and delay.
💡 Research Summary
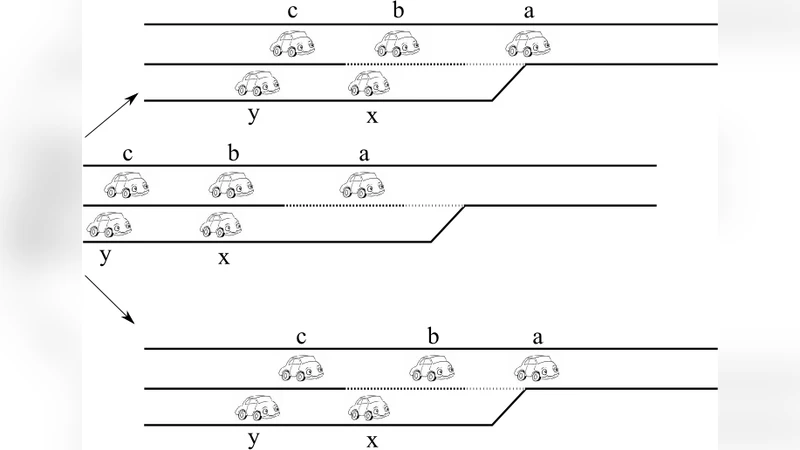
The paper addresses the persistent problem of congestion and accidents that arise at highway merging points, especially where on‑ramps feed into the mainline. Traditional solutions rely on centralized traffic signals or simple priority rules, which only react when a vehicle reaches the physical merge point. By contrast, this work leverages sensor‑equipped vehicles that can measure inter‑vehicle distances, relative speeds, and accelerations, and that can exchange this information via vehicle‑to‑vehicle (V2V) communication (e.g., DSRC or C‑V2X). The authors propose a decentralized “proactive merging” strategy that decouples the decision point from the actual merge point, allowing each vehicle to decide where and when it will merge well before it arrives at the merging zone.
System Model and Assumptions
Each vehicle i is described by its longitudinal position (x_i), speed (v_i), and acceleration (a_i). Sensors provide accurate estimates of the distance (d_{ij}) and relative speed (\Delta v_{ij}) to any neighboring vehicle j within a communication radius of 300 m. Vehicles broadcast a small packet containing ((v_i, a_i)) at a rate of 10 Hz. The road topology consists of a two‑lane mainline and a single‑lane on‑ramp; the merge point is a fixed geometric location, but the “decision point” can be placed up to several hundred meters upstream.
Algorithmic Framework
The proactive merging algorithm operates in two phases:
-
Prediction Phase – Using a simple kinematic model (constant acceleration bounded by (\pm a_{\max})), each vehicle predicts the earliest feasible time slot (t_{slot}) at which it could occupy the merge gap without violating safety headway constraints. The prediction incorporates the remaining distance (L) to the merge point, current speed, and the anticipated trajectories of neighboring vehicles.
-
Negotiation Phase – Vehicles exchange their candidate slots and compute a priority score
\
Comments & Academic Discussion
Loading comments...
Leave a Comment