Stochastic Neural Networks with Monotonic Activation Functions
We propose a Laplace approximation that creates a stochastic unit from any smooth monotonic activation function, using only Gaussian noise. This paper investigates the application of this stochastic approximation in training a family of Restricted Bo…
Authors: Siamak Ravanbakhsh, Barnabas Poczos, Jeff Schneider
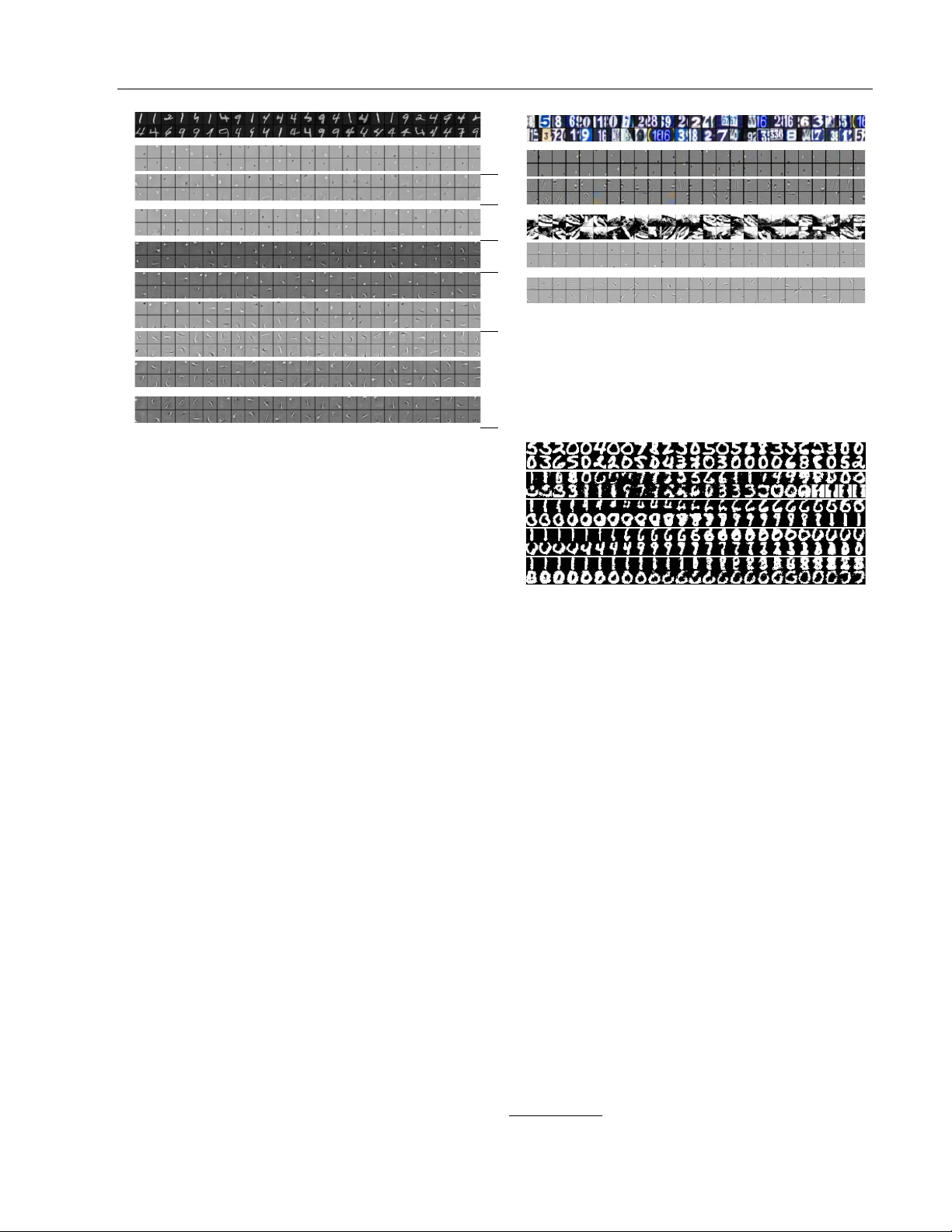
Sto c hastic Neural Net w orks with Monotonic Activ ation F unctions Siamak Ra v an bakhsh, Barnab´ as P´ oczos, Jeff Sc hneider 1 and Dale Sc huurmans, Russell Greiner 2 1 Carnegie Mellon Univ ersity , 5000 F orb es Av e, Pittsburgh, P A 15213 2 Univ ersity of Alberta, Edmonton, AB T6G 2E8, Canada Abstract W e prop ose a Laplace approximation that creates a sto c hastic unit from an y smo oth monotonic activ ation function, using only Gaussian noise. This pap er in vestigates the application of this sto c hastic approximation in training a family of Restricted Boltzmann Mac hines (RBM) that are closely link ed to Bregman divergences. This family , that w e call exp onen tial family RBM (Exp-RBM), is a subset of the exp onen tial family Harmoni- ums that expresses family members through a choice of smo oth monotonic non-linearity for eac h neuron. Using con trastive div ergence along with our Gaussian appro ximation, we sho w that Exp-RBM can learn useful repre- sen tations using nov el sto c hastic units. 1 In tro duction Deep neural netw orks ( LeCun et al. , 2015 ; Bengio , 2009 ) hav e pro duced some of the b est results in complex pattern recognition tasks where the train- ing data is abundant. Here, w e are interested in deep learning for generative modeling. Recen t years has witnessed a surge of in terest in directed gen- erativ e mo dels that are trained using (sto c hastic) bac k-propagation ( e.g. , Kingma and W elling , 2013 ; Rezende et al. , 2014 ; Goo dfello w et al. , 2014 ). These mo dels are distinct from deep energy-based mo d- els – including deep Boltzmann machine ( Hinton et al. , 2006 ) and (conv olutional) deep belief netw ork Appearing in Proceedings of the 19th International Conference on Artificial Intelligence and Statistics (AIST A TS) 2016, Cadiz, Spain. JMLR: W&CP volume 41. Copyright 2016 by the authors ( Salakh utdinov and Hin ton , 2009 ; Lee et al. , 2009 ) – that rely on a bipartite graphical mo del called re- stricted Boltzmann mac hine (RBM) in eac h la yer. Al- though, due to their use of Gaussian noise, the stochas- tic units that we introduce in this pap er can b e p o- ten tially used with sto chastic bac k-propagation, this pap er is limited to applications in RBM. T o this day , the choice of stochastic units in RBM has b een constrained to well-kno wn mem b ers of the exp o- nen tial family; in the past RBMs ha ve used units with Bernoulli ( Smolensky , 1986 ), Gaussian ( F reund and Haussler , 1994 ; Marks and Mov ellan , 2001 ), categori- cal ( W elling et al. , 2004 ), Gamma ( W elling et al. , 2002 ) and P oisson ( Gehler et al. , 2006 ) conditional distribu- tions. The exception to this sp ecialization, is the Rec- tified Linear Unit that was in tro duced with a (heuris- tic) sampling pro cedure ( Nair and Hinton , 2010 ). This limitation of RBM to well-kno wn exp onen tial family members is despite the fact that W elling et al. ( 2004 ) introduced a generalization of RBMs, called Ex- p onen tial F amily Harmoniums (EFH), co vering a large subset of exp onen tial family with bipartite structure. The architecture of EFH does not suggest a proce- dure connecting the EFH to arbitr ary non-line arities and more imp ortantly a general sampling pro cedure is missing. 1 W e introduce a useful subset of the EFH, whic h we call exp onen tial family RBMs (Exp-RBMs), with an approximate sampling pro cedure addressing these shortcomings. The basic idea in Exp-RBM is simple: restrict the sufficien t statistics to iden tity function. This allows definition of each unit using only its mean sto c hastic activ ation, which is the non-linearit y of the neuron. With this restriction, not only w e gain interpretabil- it y , but also trainability; we show that it is p ossible to efficiently sample the activ ation of these sto c has- 1 As the concluding remarks of W elling et al. ( 2004 ) suggest, this capabilit y is indeed desirable:“A future chal- lenge is therefore to start the mo delling pro cess with the desired non-linearit y and to subsequently in troduce auxil- iary v ariables to facilitate inference and learning.” 1 tic neurons and train the resulting mo del using con- trastiv e divergence. In terestingly , this restriction also closely relates the generative training of Exp-RBM to discriminativ e training using the matching loss and its regularization by noise injection. In the following, Section 2 introduces the Exp-RBM family and Section 3 inv estigates learning of Exp- RBMs via an efficient approximate sampling proce- dure. Here, we also establish connections to dis- criminativ e training and produce an in terpretation of sto c hastic units in Exp-RBMs as an infinite collection of Bernoulli units with differen t activ ation biases. Sec- tion 4 demonstrates the effectiv eness of the prop osed sampling pro cedure, when combined with contrastiv e div ergence training, in data representation. 2 The Mo del The conv en tional RBM mo dels the joint probability p ( v , h | W ) for visible v ariables v = [ v 1 , . . . , v i , . . . , v I ] with v ∈ V 1 × . . . × V I and hidden v ariables h = [ h 1 , . . . , h j , . . . h J ] with h ∈ H 1 × . . . × H J as p ( v , h | W ) = exp( − E ( v , h ) − A ( W )) . This join t probabilit y is a Boltzmann distribution with a particular energy function E : V × H → R and a normalization function A . The distinguishing prop ert y of RBM compared to other Boltzmann distributions is the conditional indep endence due to its bipartite structure. W elling et al. ( 2004 ) construct Exp onen tial F amily Harmoniums (EFH), b y first constructing independent distribution ov er individual v ariables: considering a hidden v ariable h j , its sufficient statistics { t b } b and canonical parameters { ˜ η j,b } b , this indep enden t distri- bution is p ( h j ) = r ( h j ) exp X b ˜ η j,b t b ( h j ) − A ( { ˜ η j,b } b ) where r : H j → R is the b ase me asur e and A ( { η i,a } a ) is the normalization constant. Here, for notational con- v enience, we are assuming functions with distinct in- puts are distinct – i.e. , t b ( h j ) is not necessarily the same function as t b ( h j 0 ), for j 0 6 = j . The authors then com bine these indep enden t distribu- tions using quadratic terms that reflect the bipartite structure of the EFH to get its joint form p ( v , h ) ∝ exp X i,a ˜ ν i,a t a ( v i ) (1) + X j,b ˜ η j,b t b ( h j ) + X i,a,j,b W a,b i,j t a ( v i ) t b ( h j ) where the normalization function is ignored and the base measures are represen ted as additional sufficient statistics with fixed parameters. In this mo del, the conditional distributions are p ( v i | h ) = exp X a ν i,a t a ( v j ) − A ( { ν i,a } a p ( h j | v ) = exp X b η j,b t b ( h j ) − A ( { η j,b } b where the shifte d parameters η j,b = ˜ η j,b + P i,a W a,b i,j t a ( v i ) and ν i,a = ˜ ν i,a + P j,b W a,b i,j t b ( h j ) in- corp orate the effect of evidence in netw ork on the ran- dom v ariable of interest. It is generally not p ossible to efficien tly sample these conditionals (or the joint probabilit y) for arbitrary suf- ficien t statistics. More imp ortan tly , the join t form of eq. ( 1 ) and its energy function are “obscure”. This is in the sense that the base measures { r } , dep end on the c hoice of sufficient statistics and the normaliza- tion function A ( W ). In fact for a fixed set of suffi- cien t statistics { t a ( v i ) } i , { t b ( h j ) } j , different compati- ble c hoices of normalization constants and base mea- sures ma y produce diverse subsets of the exp onen tial family . Exp-RBM is one suc h family , where sufficien t statistics are identit y functions. 2.1 Bregman Divergences and Exp-RBM Exp-RBM restricts the sufficient statistics t a ( v i ) and t b ( h j ) to single iden tity functions v i , h j for all i and j . This means the RBM has a single weigh t matrix W ∈ R I × J . As b efore, eac h hidden unit j , receiv es an input η j = P i W i,j v i and similarly each visible unit i receiv es the input ν i = P j W i,j h j . 2 Here, the conditional distributions p ( v i | ν i ) and p ( h j | η j ) hav e a single me an p ar ameter , f ( η ) ∈ M , which is equal to the mean of the conditional distribution. W e could freely assign any desired contin uous and mono- tonic non-linearit y f : R → M ⊆ R to represent the mapping from canonical parameter η j to this mean pa- rameter: f ( η j ) = R H j h j p ( h j | η j ) d h j . This choice of f defines the conditionals p ( h j | η j ) = exp − D f ( η j k h j ) − g ( h j ) (2) p ( v i | ν i ) = exp − D f ( ν i k v i ) − g ( v i ) where g is the base measure and D f is the Bregman div ergence for the function f . 2 Note that we ignore the “bias parameters” ˜ ν i and ˜ η j , since they can b e encoded using the w eights for additional hidden or visible units ( h j = 1 , v i = 1) that are clamped to one. unit name non-linearity f ( η ) Gaussian approximation conditional dist p ( h | η ) Sigmoid (Bernoulli) Unit (1 + e − η ) − 1 - exp { η h − log(1 + exp( η )) } Noisy T anh Unit (1 + e − η ) − 1 − 1 2 N ( f ( η ) , ( f ( η ) − 1 / 2)( f ( η ) + 1 / 2)) exp { η h − log(1 + exp( η )) + ent( h ) − g ( h ) } ArcSinh Unit log( η + p 1 + η 2 ) N (sinh − 1 ( η ) , ( p 1 + η 2 ) − 1 ) exp { η h − cosh( h ) + p 1 + η 2 − η sin − 1 ( η ) − g ( h ) } Symmetric Sqrt Unit (SymSqU) sign( η ) p | η | N ( f ( η ) , p | η | / 2) exp { η h − | h | 3 / 3 − 2( η 2 ) 3 4 / 3 − g ( h ) } Linear (Gaussian) Unit η N ( η , 1) exp { η h − 1 2 ( η 2 ) − 1 2 ( h 2 ) − log ( √ 2 π ) } Softplus Unit log(1 + e η ) N ( f ( η ) , (1 + e − η ) − 1 ) exp { η h + Li 2 ( − e η ) + Li 2 ( e h ) + h log(1 − e h ) − h log( e h − 1) − g ( h ) } Rectified Linear Unit (ReLU) max(0 , η ) N ( f ( η ) , I ( η > 0)) - Rectified Quadratic Unit (ReQU) max(0 , η | η | ) N ( f ( η ) , I ( η > 0) η ) - Symmetric Quadratic Unit (SymQU) η | η | N ( η | η | , | η | ) exp { η h − | η | 3 / 3 − 2( h 2 ) 3 4 / 3 − g ( h ) } Exponential Unit e η N ( e η , e η ) exp { η h − e η − h (log( y ) − 1) − g ( h ) } Sinh Unit 1 2 ( e η − e − η ) N (sinh( η ) , cosh( η )) exp { η h − cosh( η ) + √ 1 + h 2 − h sin − 1 ( h ) − g ( h ) } Poisson Unit e η - exp { η h − e η − h ! } T able 1: Sto chastic units, their c onditional distribution (e q. ( 2 ) ) and the Gaussian appr oximation to this distribution. Her e Li( · ) is the polylo garithmic function and I (cond . ) is e qual to one if the c ondition is satisfie d and zer o otherwise. en t( p ) is the binary entr opy function. The Bregman div ergence ( Bregman , 1967 ; Banerjee et al. , 2005 ) b et w een h j and η j for a monotonically increasing transfer function (corresp onding to the ac- tiv ation function) f is given by 3 D f ( η j k h j ) = − η j h j + F ( η j ) + F ∗ ( h j ) (3) where F with d d η F ( η j ) = f ( η j ) is the an ti-deriv ative of f and F ∗ is the an ti-deriv ative of f − 1 . Substitut- ing this expression for Bregmann div ergence in eq. ( 2 ), w e notice b oth F ∗ and g are functions of h j . In fact, these tw o functions are often not separated ( e.g. , Mc- Cullagh et al. , 1989 ). By separating them we see that some times, g simplifies to a constant, enabling us to appro ximate Equation ( 2 ) in Section 3.1 . Example 2.1. Let f ( η j ) = η j b e a linear neu- ron. Then F ( η j ) = 1 2 η 2 j and F ∗ ( h j ) = 1 2 h 2 j , giving a Gaussian conditional distribution p ( h j | η j ) = e − 1 2 ( h j − η j ) 2 + g ( h j ) , where g ( h j ) = log( √ 2 π ) is a con- stan t. 2.2 The Joint F orm So far we hav e defined the conditional distribution of our Exp-RBM as members of, using a single mean pa- rameter f ( η j ) (or f ( ν i ) for visible units) that repre- sen ts the activ ation function of the neuron. Now we 3 The con ven tional form of Bregman div ergence is D f ( η j k h j ) = F ( η j ) − F ( f − 1 ( h j )) − h j ( η j − f − 1 ( h j )), where F is the anti-deriv ativ e of f . Since F is strictly con vex and differen tiable, it has a Legendre-F ench el dual F ∗ ( h j ) = sup η j h h j , η j i − F ( η j ). No w, set the deriv a- tiv e of the r.h.s. w.r.t. η j to zero to get h j = f ( η j ), or η j = f − 1 ( h j ), where F ∗ ( h j ) is the anti-deriv ativ e of f − 1 ( h i ). Using the duality to switch f and f − 1 in the ab o v e we can get F ( f − 1 ( h j )) = h j f − 1 ( h j ) − F ∗ ( h j ). By replacing this in the original form of Bregman divergence w e get the alternative form of Equation ( 3 ). w ould lik e to find the corresponding joint form and the energy function. The problem of relating the lo cal conditionals to the join t form in graphical mo dels go es back to the work of Besag ( 1974 ).It is easy to chec k that, using the more general treatment of Y ang et al. ( 2012 ), the joint form corresp onding to the conditional of eq. ( 2 ) is p ( v , h | W ) = exp v T · W · h (4) − X i F ∗ ( v i ) + g ( v i ) − X j F ∗ ( h j ) + g ( h j ) − A ( W ) where A ( W ) is the join t normalization constan t. It is noteworth y that only the an ti-deriv ative of f − 1 , F ∗ app ears in the join t form and F is absent. F rom this, the energy function is E ( v , h ) = − v T · W · h (5) + X i F ∗ ( v i ) + g ( v i ) + X j F ∗ ( h j ) + g ( h j ) . Example 2.2. F or the sigmoid non-linearity f ( η j ) = 1 1+ e − η j , we hav e F ( η j ) = log(1 + e η j ) and F ∗ ( h j ) = (1 − h j ) log(1 − h j ) + h j log( h j ) is the negativ e entrop y . Since h j ∈ { 0 , 1 } only tak es ex- treme v alues, the negative entrop y F ∗ ( h j ) ev aluates to zero: p ( h j | η j ) = exp h j η j − log(1 + exp( η j )) − g ( h j ) (6) Separately ev aluating this expression for h j = 0 and h j = 1, sho ws that the ab o ve conditional is a well-defined distribution for g ( h j ) = 0, and in fact it turns out to b e the sigmoid function itself – i.e. , p ( h j = 1 | η j ) = 1 1+ e − η j . When all con- ditionals in the RBM are of the form eq. ( 6 ) – i.e. , for a binary RBM with a sigmoid non-linearit y , since { F ( η j ) } j and { F ( ν i ) } i do not app ear in the join t form eq. ( 4 ) and F ∗ (0) = F ∗ (1) = 0, the join t form has the simple and the familiar form p ( v , h ) = exp v T · W · h − A ( W ) . 3 Learning A consistent estimator for the parameters W , given observ ations D = { v (1) , . . . , v ( N ) } , is obtained by maximizing the marginal likelihoo d Q n p ( v ( n ) | W ), where the eq. ( 4 ) defines the join t probability p ( v , h ). The gradient of the log-marginal-lik eliho od ∇ W P n log( p ( v ( n ) | W )) is 1 N X n E p ( h | v ( n ) ,W ) [ h · ( v ( n ) ) T ] − E p ( h,v | W ) [ h · v T ] (7) where the first exp ectation is w.r.t. the observed data in which p ( h | v ) = Q j p ( h j | v ) and p ( h j | v ) is given b y eq. ( 2 ). The second exp ectation is w.r.t. the mo del of eq. ( 4 ). When discriminativ ely training a neuron f ( P i W i,j v i ) using input output pairs D = { ( v ( n ) , h ( n ) j ) } n , in order to hav e a loss that is con vex in the mo del parame- ters W : j , it is common to use a matching loss for the giv en transfer function f ( Helmbold et al. , 1999 ). This is simply the Bregman divergence D f ( f ( η ( n ) j ) k h ( n ) j ), where η ( n ) j = P i W i,j v ( n ) i . Minimizing this matc h- ing loss corresp onds to maximizing the log-likelihoo d of eq. ( 2 ), and it should not b e surprising that the gradient ∇ W : j P n D f ( f ( η ( n ) j ) k h ( n ) j ) of this loss w.r.t. W : j = [ W 1 ,j , . . . , W M ,j ] X n f ( η ( n ) j )( v ( n ) ) T − h ( n ) j ( v ( n ) ) T resem bles that of eq. ( 7 ), where f ( η ( n ) j ) ab o ve substi- tutes h j in eq. ( 7 ). Ho wev er, note that in generative training, h j is not simply equal to f ( η j ), but it is sampled from the expo- nen tial family distribution eq. ( 2 ) with the mean f ( η j ) – that is h j = f ( η j ) + noise. This extends the previous observ ations linking the discriminative and generative (or regularized) training – via Gaussian noise injection – to the noise from other members of the exp onen tial family ( e.g. , An , 1996 ; Vincent et al. , 2008 ; Bishop , 1995 ) which in turn relates to the regularizing role of generativ e pretraining of neural netw orks ( Erhan et al. , 2010 ). Our sampling scheme (next s ection) further suggests that when using output Gaussian noise injection for regularization of arbitrary activ ation functions, the v ariance of this noise should b e scaled b y the deriv ativ e of the activ ation function. 3.1 Sampling T o learn the generative mo del, we need to b e able to sample from the distributions that define the exp ec- tations in eq. ( 7 ). Sampling from the joint mo del can also b e reduced to alternating conditional sampling of visible and hidden v ariables ( i.e. , blo ck Gibbs sam- pling). Many metho ds, including contrastiv e diver- gence (CD; Hinton , 2002 ), sto c hastic maximum likeli- ho od (a.k.a. p ersisten t CD Tieleman , 2008 ) and their v ariations ( e.g. , Tieleman and Hin ton , 2009 ; Breuleux et al. , 2011 ) only require this alternating sampling in order to optimize an approximation to the gradient of eq. ( 7 ). Here, we are interested in sampling from p ( h j | η j ) and p ( v i | ν i ) as defined in eq. ( 2 ), which is in gen- eral non-trivial. Ho wev er some members of the exp o- nen tial family hav e relatively efficient sampling pro ce- dures ( Ahrens and Dieter , 1974 ). One of these mem- b ers that we use in our exp erimen ts is the Poisson distribution. Example 3.1. F or a P oisson unit, a P oisson dis- tribution p ( h j | λ ) = λ h j h j ! e − λ (8) represen ts the probabilit y of a neuron firing h j times in a unit of time, giv en its av erage rate is λ . W e can define P oisson units within Exp-RBM using f j ( η j ) = e η j , whic h gives F ( η j ) = e η j and F ∗ ( h j ) = h j (log( h j ) − 1). F or p ( h j | η j ) to be prop- erly normalized, since h j ∈ Z + is a non-negativ e in teger, F ∗ ( h j ) + g ( h j ) = log ( h j !) ≈ F ∗ ( h j ) (using Sterling’s approximation). This gives p ( h j | η j ) = exp h j η j − e η j − log( h j !) whic h is identical to dis- tribution of eq. ( 8 ), for λ = e η j . This means, w e can use any av ailable sampling routine for Poisson distribution to learn the parameters for an exp o- nen tial family RBM where some units are Poisson. In Section 4 , we use a mo dified v ersion of Kn uth’s metho d ( Knuth , 1969 ) for Poisson sampling. By making a simplifying assumption, the follo wing Laplace approximation demonstrates how to use Gaus- sian noise to sample from general conditionals in Exp- RBM, for “any” smo oth and monotonic non-linearity . Prop osition 3.1. Assuming a c onstant b ase me asur e g ( h i ) = c , the distribution of p ( h j k η j ) is to the se c ond (a) ArcSinh unit (b) Sinh unit (c) Softplus unit (d) Exp unit Figure 1: Conditional pr ob ability of e q. ( 11 ) for differ ent stochastic units (top r ow) and the Gaussian appr oximation of Pr op osition 3.1 (bottom r ow) for the same unit. Her e the horizontal axis is the input η j = P i W i,j v i and the vertic al axis is the sto chastic activation h j with the intensity p ( h j | η j ) . se e T able 1 for more details on these stochastic units. or der appr oximate d by a Gaussian exp − D f ( η j k h j ) − c ≈ N ( h j | f ( η j ) , f 0 ( η j ) ) (9) wher e f 0 ( η j ) = d d η j f ( η j ) is the derivative of the acti- vation function. Pr o of. The mo de (and the mean) of the conditional eq. ( 2 ) for η j is f ( η j ). This is b ecause the Bregman div ergence D f ( η j k h j ) achiev es minim um when h j = f ( η j ). Now, write the T aylor series appro ximation to the target log-probability around its mo de log( p ( ε + f ( η j ) | η j )) = log( − D f ( η j k ε + f ( η j ))) − c = η j f ( η j ) − F ∗ ( f ( η j )) − F ( η j ) + ε ( η j − f − 1 ( f ( η j )) + 1 2 ε 2 ( − 1 f 0 ( η j ) ) + O ( ε 3 ) = η j f ( η j ) − ( η j f ( η j ) − F ( η j )) − F ( η j ) + ε ( η j − η j ) + 1 2 ε 2 ( − 1 f 0 ( η j ) ) + O ( ε 3 ) = − 1 2 ε 2 f 0 ( η j ) + O ( ε 3 ) (10a) (10b) (10c) In eq. ( 10a ) w e used the fact that d d y f − 1 ( y ) = 1 f 0 ( f − 1 ( y )) and in eq. ( 10b ), we used the conjugate du- alit y of F and F ∗ . Note that the final unnormalized log-probabilit y in eq. ( 10c ) is that of a Gaussian, with mean zero and v ariance f 0 ( η j ). Since our T aylor ex- pansion was around f ( η j ), this gives us the approxi- mation of eq. ( 9 ). 3.1.1 Sampling Accuracy T o exactly ev aluate the accuracy of our sampling sc heme, w e need to ev aluate the conditional distribu- tion of eq. ( 2 ). Ho wev er, we are not aw are of any an- alytical or numeric metho d to estimate the base mea- sure g ( h j ). Here, we replace g ( h j ) with ˜ g ( η j ), playing the role of a normalization constan t. W e then ev aluate p ( h j | η j ) ≈ exp − D f ( η j k h j ) − ˜ g ( η j ) (11) where ˜ g ( η j ) is numerically appro ximated for each η j v alue. Figure 1 compares this densit y against the Gaussian appro ximation p ( h j | η j ) ≈ N ( f ( η j ) , f 0 ( η j ) ). As the figure shows, the densities are very similar. 3.2 Bernoulli Ensemble Interpretation This section gives an interpretation of Exp-RBM in terms of a Bernoulli RBM with an infinite collection of Bernoulli units. Nair and Hinton ( 2010 ) introduce the softplus unit, f ( η j ) = log(1 + e η j ), as an approximation to the rectified linear unit (ReLU) f ( η j ) = max(0 , η j ). T o hav e a probabilistic interpretation for this non- linearit y , the authors represent it as an infinite series of Bernoulli units with shifted bias: log(1 + e η j ) = ∞ X n =1 σ ( η j − n + . 5) (12) where σ ( x ) = 1 1+ e − x is the sigmoid function. This means that the sample y j from a softplus unit is effectively the num b er of active Bernoulli units. The authors then suggest using h j ∼ max(0 , N ( η j , σ ( η j )) to sample from this t yp e of unit. In comparison, our Proposition 3.1 suggests using h j ∼ N (log (1 + e η j ) , σ ( η j )) for softplus and h j ∼ N (max(0 , η j ) , step ( η j )) – where step ( η j ) is the step function – for ReLU. Both of these are very similar to the approximation of ( Nair and Hinton , 2010 ) and we found them to p erform similarly in practice as well. Note that these Gaussian approximations are assum- ing g ( η j ) is constant. How ever, b y numerically ap- - 20 - 10 10 20 2 4 6 8 10 12 Figure 2: Numeric al appr oximation to the inte gr al R H j exp − D f ( η j k h j ) d h j for the softplus unit f ( η j ) = log(1 + e η j ) , at differ ent η j . pro ximating R H j exp − D f ( η j k h j ) d h j , for f ( η j ) = log(1 + e η j ), Figure 2 shows that the in tegrals are not the same for different v alues of η j , showing that the base measure g ( h j ) is not constant for ReLU. In spite of this, experimental results for pretraining ReLU units using Gaussian noise suggests the usefulness of this type of approximation. W e can extend this interpretation as a collection of (w eighted) Bernoulli units to any non-linearity f . F or simplicit y , let us assume lim η →−∞ f ( η ) = 0 and lim η → + ∞ f ( η ) = ∞ 4 , and define the following series of Bernoulli units: P ∞ n =0 ασ ( f − 1 ( αn )), where the given parameter α is the weigh t of each unit. Here, we are defining a new Bernoulli unit with a weigh t α for each α unit of change in the v alue of f . Note that the un- derlying idea is similar to that of inv erse transform sampling ( Devroy e , 1986 ). At the limit of α → 0 + w e ha ve f ( η j ) ≈ α ∞ X n =0 σ ( η j − f − 1 ( αn )) (13) that is ˆ h j ∼ p ( h j | η j ) is the weigh ted sum of active Bernoulli units. Figure 4 (a) shows the approximation of this series for the softplus function for decreasing v alues of α . 4 Exp erimen ts and Discussion W e ev aluate the represen tation capabilities of Exp- RBM for differen t sto c hastic units in the following t wo sections. Our initial attempt was to adapt An- nealed Imp ortance Sampling (AIS; Salakhutdino v and Murra y , 2008 ) to Exp-RBMs. Ho w ever, estimation of the imp ortance sampling ratio in AIS for general Exp- RBM prov ed challenging. W e consider t wo alterna- tiv es: 1) for large datasets, Section 4.1 qualitatively 4 The following series and the sigmoid function need to be adjusted dep ending on these limits. F or example, for the case where h j is an tisymmetric and unbounded ( e.g. , f ( η j ) ∈ { sinh( η j ) , sinh − 1 ( η j ) , η j | η j |} ), we need to change the domain of Bernoulli units from { 0 , 1 } to {− . 5 , + . 5 } . This corresponds to changing the sigmoid to h yp erb olic tangent 1 2 tanh( 1 2 η j ). In this case, we also need to change the b ounds for n in the series of eq. ( 13 ) to ±∞ . Figure 3: r e c onstruction of R eLU by as a series of Bernoul li units with shifte d bias. Figure 4: Histo gr am of hidden variable activities on the MNIST test data, for different typ es of units. Units with he avier tails pr o duc e longer str okes in Figur e 5 . Note that the line ar de c ay of activities in the lo g-domain corr esp ond to exp onential de c ay with differ ent exp onential c o efficients. ev aluates the filters learned by v arious units and; 2) Section 4.2 ev aluates Exp-RBMs on a smaller dataset where w e can use indirect sampling likelihoo d to quan- tify the generative qualit y of the mo dels with different activ ation functions. Our ob jective here is to demonstrate that a combi- nation of our sampling scheme with contrastiv e di- v ergence (CD) training can indeed pro duce generative mo dels for a diverse choice of activ ation function. 4.1 Learning Filters In this section, we used CD with a single Gibbs sam- pling step, 1000 hidden units, Gaussian visible units 5 , mini-batc hes and metho d of momen tum, and selected the learning rate from { 10 − 2 , 10 − 3 , 10 − 4 } using recon- struction error at the final ep o c h. The MNIST handwritten digits dataset ( LeCun et al. , 1998 ) is a dataset of 70,000 “size-normalized and cen- tered” binary images. Eac h image is 28 × 28 pixel, and represen ts one of { 0 , 1 , . . . , 9 } digits. See the first row of Figure 5 for few instances from MNIST dataset. F or this dataset we use a momentum of . 9 and train each mo del for 25 ep o c hs. Figure 5 shows the filters of dif- feren t sto c hastic units; see T able 1 for details on differ- en t sto c hastic units. Here, the units are ordered based on the asymptotic b eha vior of the activ ation function 5 Using Gaussian visible units also assumes that the in- put data is normalized to hav e a standard deviation of 1. data N.T anh bounded arcSinh log. SymSq sqrt ReL linear ReQ quadratic SymQ Sinh exponential Exp Poisson Figure 5: Samples fr om the MNIST dataset (first two r ows) and the filters with highest varianc e for different Exp- RBM sto chastic units (two r ows p er unit typ e). F rom top to b ottom the non-line arities gr ow mor e rapidly, also pro- ducing fe atur es that r epr esent longer str okes. f ; see the right margin of the figure. This asymptotic c hange in the activ ation function is also eviden t from the hidden unit activ ation histogram of Figure 4 (b), where the activ ation are produced on the test set us- ing the trained mo del. These tw o figures suggest that transfer functions with faster asymptotic gro wth, hav e a more heavy-tailed distributions of activ ations and longer strok es for the MNIST dataset, also hinting that they may b e prefer- able in learning representation ( e.g. , see Olshausen and Field , 1997 ). How ever, this comes at the cost of train- abilit y . In particular, for all exp onen tial units, due to o ccasionally large gradients, we hav e to reduce the learning rate to 10 − 4 while the Sigmoid/T anh unit re- mains stable for a learning rate of 10 − 2 . Other factors that affect the instability of training for exp onential and quadratic Exp-RBMs are large momentum and small num b er of hidden units. Initialization of the w eights could also play an imp ortan t role, and sparse initialization ( Sutskev er et al. , 2013 ; Martens , 2010 ) and regularization schemes ( Go odfellow et al. , 2013 ) could potentially improv e the training of these mo dels. In all exp eriments, we used uniformly random v alues in [ − . 01 , . 01] for all unit t yp es. In terms of training time, different Exp-RBMs that use the Gaussian noise and/or Sigmoid/T anh units hav e similar computation time on b oth CPU and GPU. Figure 6 (top) shows the receptive fields for the street- view house n umbers (SVHN) ( Netzer et al. , 2011 ) dataset. This dataset contains 600,000 images of digits in natural settings. Each image con tains three RGB dataset SVHN sigmoid ReQU dataset NORB T anh SymQU Figure 6: Samples and the r e c eptive fields of different sto chastic units for fr om the (top thr e e r ows) SVHN dataset and (b ottom thr e e r ows) 48 × 48 (non-ster e o) NORB dataset with jittere d obje cts and cluttere d b ack- gr ound. Sele ction of the r e c eptive fields is b ase d on their varianc e. dataset T anh ReL ReQ Sinh Figure 7: Samples fr om the USPS dataset (first two r ows) and few of the c onse cutive samples gener ate d fr om differ ent Exp-RBMs using r ates-FPCD. v alues for 32 × 32 pixels. Figure 6 (b ottom) sho ws few filters obtained from the jittered-cluttered NORB dataset ( LeCun et al. , 2004 ). NORB dataset contains 291,600 stereo 2 × (108 × 108) images of 50 toys under differen t lighting, angle and bac kgrounds. Here, w e use a sub-sampled 48 × 48 v ariation, and rep ort the features learned by t wo t yp es of neurons. F or learn- ing from these t wo datasets, we increased the momen- tum to . 95 and trained different models using up to 50 ep ochs. 4.2 Generating Samples The USPS dataset ( Hull , 1994 ) is relatively smaller dataset of 9,298, 16 × 16 digits. W e binarized this data and used 90%, 5% and 5% of instances for training, v alidation and test resp ectiv ely; see Figure 7 (first tw o ro ws) for instances from this dataset. W e used T anh activ ation function for the 16 × 16 = 256 visible units of the Exp-RBMs 6 and 500 hidden units of different t yp es: 1) T anh unit; 2) ReLU; 3) ReQU and 4)Sinh unit. 6 T anh unit is similar to the sigmoid/Bernoulli unit, with the difference that it is (anti)symmetric v i ∈ {− . 5 , + . 5 } . 2000 4000 6000 8000 10000 Iteration 110 100 90 80 Log Likelihood Tanh ReLU ReQU Sinh training 2000 4000 6000 8000 10000 Iteration 0.86 0.87 0.88 0.89 0.90 0.91 0.92 optimal beta Tanh ReLU ReQU Sinh Figure 8: Indir e ct Sampling Likeliho o d of the test data (left) and β ∗ for the density estimate (right) at differ ent ep o chs (x-axis) for USPS dataset. W e then trained these mo dels using CD with 10 Gibbs sampling steps. Our choice of CD rather than al- ternativ es that are known to pro duce b etter genera- tiv e mo dels, suc h as Persisten t CD (PCD; Tieleman , 2008 ), fast PCD (FPCD; Tieleman and Hin ton , 2009 ) and (rates-FPCD; Breuleux et al. , 2011 ) is due to practical reasons; these alternatives were unstable for some activ ation functions, while CD w as alwa ys well- b eha v ed. W e ran CD for 10,000 epo c hs with three differen t learning rates { . 05 , . 01 , . 001 } for each mo del. Note that here, we did not use metho d of momentum and mini-batc hes in order to to minimize the num b er of hyper-parameters for our quantitativ e comparison. W e used rates-FPCD 7 to generate 9298 × 90 100 sam- ples from eac h mo del – i.e. , the same num ber as the samples in the training set. W e pro duce these sam- pled datasets ev ery 1000 ep ochs. Figure 7 sho ws the samples generated by different mo dels at their final ep och, for the “b est c hoices” of sampling parameters and learning rate. W e then used these samples D sample = { v (1) , . . . , v ( N =9298) } , from each mo del to esti- mate the Indirect Sampling Likelihoo d (ISL; Breuleux et al. , 2011 ) of the v alidation set. F or this, we built a non-parametric density estimate ˆ p ( v ; β ) = N X n =1 256 Y j =1 β I ( v ( n ) j = v j ) (1 − β ) I ( v ( n ) j 6 = v j ) (14) and optimized the parameter β ∈ ( . 5 , 1) to maxi- mize the lik eliho od of the v alidation set – that is β ∗ = arg β max Q v ∈ D valid ˆ p ( v , β ). Here, β = . 5 defines a uniform distribution ov er all p ossible binary images, while for β = 1, only the training instances hav e a non-zero probability . W e then used the densit y estimate for β ∗ as well as the b est rates-FPCD sampling parameter to ev aluate 7 W e used 10 Gibbs sampling steps for eac h sample, zero deca y of fast weigh ts – as suggested in ( Breuleux et al. , 2011 ) – and three different fast rates { . 01 , . 001 , . 0001 } . the ISL of the test set . At this point, we hav e an estimate of the likelihoo d of test data for eac h hidden unit t yp e, for ev ery 1000 iteration of CD up dates. The lik eliho o d of the test data using the densit y estimate pro duced dir e ctly fr om the tr aining data , gives us an upp er-bound on the ISL of these mo dels. Figure 8 presen ts all these quantities: for each hidden unit t yp e, we present the results for the learning rate that achiev es the highest ISL. The figure shows the es- timated log-likelihoo d (left) as well as β ∗ (righ t) as a function of the n umber of ep o c hs. As the num b er of iterations increases, all models pro duce samples that are more representativ e (and closer to the training-set lik eliho o d). This is also consisten t with β ∗ v alues get- ting closer to β ∗ training = . 93, the optimal parameter for the training set. In general, we found sto c hastic units defined using ReLU and Sigmoid/T anh to b e the most numerically stable. Ho w ever, for this problem, ReQU learns the b est mo del and even by increasing the CD steps to 25 and also increasing the ep o c hs by a factor of tw o w e could not produce similar results using T anh units. This shows that a non-linearities outside the circle of well-kno wn and commonly used exp onen tial fam- ily , can sometimes pro duce more pow erful generative mo dels, even using an “approximate” sampling pro ce- dure. Conclusion This pap er studies a subset of exp onen tial family Har- moniums (EFH) with a single sufficien t statistics for the purp ose of learning generativ e mo dels. The result- ing family of distributions, Exp-RBM, gives a freedom of choice for the activ ation function of individual units, paralleling the freedom in discriminative training of neural netw orks. Moreov er, it is p ossible to efficiently train arbitrary members of this family . F or this, we in tro duced a principled and efficien t appro ximate sam- pling pro cedure and demonstrated that v arious Exp- RBMs can learn useful generative mo dels and filters. References Joac him H Ahrens and Ulric h Dieter. Computer meth- o ds for sampling from gamma, b eta, p oisson and bionomial distributions. Computing , 12(3):223–246, 1974. Guozhong An. The effects of adding noise during bac kpropagation training on a generalization p er- formance. Neur al Computation , 8(3):643–674, 1996. Arindam Banerjee, Srujana Merugu, Inderjit S Dhillon, and Joydeep Ghosh. Clustering with breg- man divergences. JMLR , 6:1705–1749, 2005. Y oshua Bengio. Learning deep architectures for ai. F oundations and tr ends in ML , 2(1), 2009. Julian Besag. Spatial interaction and the statistical analysis of lattice systems. Journal of the R oyal Statistic al So ciety. Series B (Metho dolo gic al) , pages 192–236, 1974. Chris M Bishop. T raining with noise is equiv alent to tikhono v regularization. Neur al c omputation , 7(1): 108–116, 1995. Lev M Bregman. The relaxation metho d of finding the common p oin t of conv ex sets and its application to the solution of problems in conv ex programming. USSR CMMP , 7(3):200–217, 1967. Olivier Breuleux, Y oshua Bengio, and Pascal Vincent. Quic kly generating represen tative samples from an rbm-deriv ed process. Neur al Computation , 23(8): 2058–2073, 2011. L. Devroy e. Non-uniform r andom variate gener ation . Springer-V erlag, 1986. ISBN 9783540963059. Dumitru Erhan, Y osh ua Bengio, Aaron Courville, Pierre-An toine Manzagol, P ascal Vincent, and Samy Bengio. Why do es unsup ervised pre-training help deep learning? JMLR , 11:625–660, 2010. Y oav F reund and David Haussler. Unsup ervise d le arn- ing of distributions of binary ve ctors using two layer networks . Computer Researc h Laboratory [Univ er- sit y of California, Santa Cruz], 1994. P eter V Gehler, Alex D Holub, and Max W elling. The rate adapting poisson mo del for information re- triev al and ob ject recognition. In Pr o c e e dings of the 23r d international c onfer enc e on Machine le arning , pages 337–344. ACM, 2006. Ian Go o dfello w, Jean P ouget-Abadie, Mehdi Mirza, Bing Xu, David W arde-F arley , Sherjil Ozair, Aaron Courville, and Y oshua Bengio. Generative adv ersar- ial nets. In A dvanc es in Neur al Information Pr o c ess- ing Systems , pages 2672–2680, 2014. Ian J Go odfellow, David W arde-F arley , Mehdi Mirza, Aaron Courville, and Y osh ua Bengio. Maxout net- w orks. arXiv pr eprint arXiv:1302.4389 , 2013. Da vid P Helmbold, Jyrki Kivinen, and Manfred K W armuth. Relativ e loss bounds for single neu- rons. Neur al Networks, IEEE T r ansactions on , 10 (6):1291–1304, 1999. Geoffrey Hin ton. T raining pro ducts of experts by min- imizing contrastiv e div ergence. Neur al c omputation , 14(8):1771–1800, 2002. Geoffrey Hinton, Simon Osindero, and Y ee-Wh y e T eh. A fast l earning algorithm for deep b elief nets. Neur al c omputation , 18(7):1527–1554, 2006. Jonathan J Hull. A database for handwritten text recognition research. Pattern Analysis and Machine Intel ligenc e, IEEE T r ansactions on , 16(5):550–554, 1994. Diederik P Kingma and Max W elling. Auto-enco ding v ariational ba yes. arXiv pr eprint arXiv:1312.6114 , 2013. Donald E Knuth. Semin umerical algorithms. the art of computer programming, 1969. Y ann LeCun, L´ eon Bottou, Y oshua Bengio, and P atrick Haffner. Gradient-based learning applied to do cumen t recognition. Pr o c e e dings of the IEEE , 86 (11):2278–2324, 1998. Y ann LeCun, F u Jie Huang, and Leon Bottou. Learn- ing metho ds for generic ob ject recognition with in- v ariance to p ose and lighting. In CVPR, 2004 , vol- ume 2, pages I I–97, 2004. Y ann LeCun, Y oshua Bengio, and Geoffrey Hin ton. Deep learning. Natur e , 521(7553):436–444, 2015. Honglak Lee, Roger Grosse, Ra jesh Ranganath, and Andrew Y Ng. Conv olutional deep belief netw orks for scalable unsup ervised learning of hierarchical represen tations. In Pr o c e e dings of the 26th A n- nual International Confer enc e on Machine L e arn- ing , pages 609–616. ACM, 2009. Tim K Marks and Ja vier R Mo vellan. Diffusion net- w orks, pro duct of exp erts, and factor analysis. In Pr o c. Int. Conf. on Indep endent Comp onent Analy- sis , pages 481–485, 2001. James Martens. Deep learning via hessian-free opti- mization. In ICML-10 , pages 735–742, 2010. P eter McCullagh, John A Nelder, and P McCullagh. Gener alize d line ar mo dels , volume 2. Chapman and Hall London, 1989. Vino d Nair and Geoffrey E Hinton. Rectified linear units improv e restricted b oltzmann machines. In ICML-10 , pages 807–814, 2010. Y uv al Netzer, T ao W ang, Adam Coates, Alessandro Bissacco, Bo W u, and Andrew Y Ng. Reading digits in natural images with unsup ervised feature learning. In NIPS workshop , v olume 2011, page 5. Granada, Spain, 2011. Bruno A Olshausen and David J Field. Sparse co ding with an ov ercomplete basis set: A strategy employ ed b y v1? Vision r ese ar ch , 37(23):3311–3325, 1997. Danilo Jimenez Rezende, Shakir Mohamed, and Daan Wierstra. Sto c hastic backpropagation and approx- imate inference in deep generativ e mo dels. arXiv pr eprint arXiv:1401.4082 , 2014. Ruslan Salakh utdinov and Geoffrey E Hin ton. Deep b oltzmann machines. In International Confer enc e on Artificial Intel ligenc e and Statistics , pages 448– 455, 2009. Ruslan Salakhutdino v and Iain Murray . On the quanti- tativ e analysis of deep b elief net works. In ICML-08 , pages 872–879. ACM, 2008. P aul Smolensky . Information pro cessing in dynamical systems: F oundations of harmon y theory . 1986. Ily a Sutskev er, James Martens, George Dahl, and Ge- offrey Hin ton. On the imp ortance of initialization and momentum in deep learning. In ICML-13 , pages 1139–1147, 2013. Tijmen Tieleman. T raining restricted b oltzmann ma- c hines using approximations to the likelihoo d gradi- en t. In Pr o c e e dings of the 25th international c onfer- enc e on Machine le arning , pages 1064–1071. ACM, 2008. Tijmen Tieleman and Geoffrey Hinton. Using fast w eights to improv e persistent contrastiv e diver- gence. In Pr o c e e dings of the 26th A nnual Inter- national Confer enc e on Machine L e arning , pages 1033–1040. ACM, 2009. P ascal Vincent, Hugo Laro c helle, Y oshua Bengio, and Pierre-An toine Manzagol. Extracting and compos- ing robust features with denoising auto enco ders. In ICML-08 , pages 1096–1103, 2008. Max W elling, Simon Osindero, and Geoffrey E Hinton. Learning sparse top ographic representations with pro ducts of student-t distributions. In A dvanc es in neur al information pr o c essing systems , pages 1359– 1366, 2002. Max W elling, Michal Rosen-Zvi, and Geoffrey E Hin- ton. Exp onen tial family harmoniums with an ap- plication to information retriev al. In NIPS , pages 1481–1488, 2004. Eunho Y ang, Genevera Allen, Zhandong Liu, and Pradeep K Ra vikumar. Graphical mo dels via gen- eralized linear mo dels. In NIPS , pages 1358–1366, 2012. Algorithm 1: T raining Exp-RBMs using contrastiv e div ergence Input : training data D = { v ( n ) } 1 ≤ n ≤ N ;#CD steps; #ep ochs; learning rate λ ; activ ation functions { f ( v i ) } i , { f ( h j ) } j Output : mo del parameters W Initialize W for #ep o chs do /* positive phase (+) */ + η ( n ) j = P i W i,j + v ( n ) i ∀ j, n if using Gaussian apprx. then + h ( n ) j ∼ N ( f ( + η ( n ) j ) , f 0 ( + η ( n ) j )) ∀ j, n else + h ( n ) j ∼ p ( h j | + v ( n ) ) ∀ j, n − h ( n ) ← + h ( n ) ∀ n /* negative phase (-) */ for #CD steps do − ν ( n ) i = P j W i,j − h ( n ) i ∀ i, n if using Gaussian apprx. then − v ( n ) i ∼ N ( f ( − ν ( n ) i ) , f 0 ( − ν ( n ) i )) ∀ i, n else − v ( n ) j ∼ p ( v j | h ( n ) ) ∀ i, n − η ( n ) j = P i W i,j − v ( n ) i ∀ j, n if using Gaussian apprx. then − h ( n ) j ∼ N ( f ( − η ( n ) j ) , f 0 ( − η ( n ) j )) ∀ j, n else + h ( n ) j ∼ p ( h j | − v ( n ) ) ∀ j, n end W i,j ← W i,j + λ ( + v i + h j ) − ( − v i − h j ) ∀ i, j end
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment