Wireless Sensor Networks Localization Methods: Multidimensional Scaling vs. Semidefinite Programming Approach
With the recent development of technology, wireless sensor networks are becoming an important part of many applications such as health and medical applications, military applications, agriculture monitoring, home and office applications, environmental monitoring, etc. Knowing the location of a sensor is important, but GPS receivers and ophisticated sensors are too expensive and require processing power. Therefore, the localization wireless sensor network problem is a growing field of interest. The aim of this paper is to give a comparison of wireless sensor network localization methods, and therefore, multidimensional scaling and semidefinite programming are chosen for this research. Multidimensional scaling is a simple mathematical technique widely-discussed that solves the wireless sensor networks localization problem. In contrast, semidefinite programming is a relatively new field of optimization with a growing use, although being more complex. In this paper, using extensive simulations, a detailed overview of these two approaches is given, regarding different network topologies, various network parameters and performance issues. The performances of both techniques are highly satisfactory and estimation errors are minimal
💡 Research Summary
The paper presents a systematic comparison of two prominent techniques for node localization in wireless sensor networks (WSNs): classical Multidimensional Scaling (MDS) and modern Semidefinite Programming (SDP). After motivating the need for low‑cost, low‑power positioning—since GPS modules are often infeasible for dense sensor deployments—the authors review related work and outline the theoretical foundations of each method. MDS reconstructs node coordinates from a noisy distance matrix by means of eigen‑decomposition and a subsequent anchor‑based alignment, offering a straightforward implementation with computational complexity on the order of O(N³). SDP, in contrast, formulates the localization problem as a convex optimization over a positive‑semidefinite matrix that encodes the distance constraints; this yields a globally optimal or near‑optimal solution that is robust to measurement noise, but at the cost of much higher complexity (approximately O(N⁶)) and memory consumption.
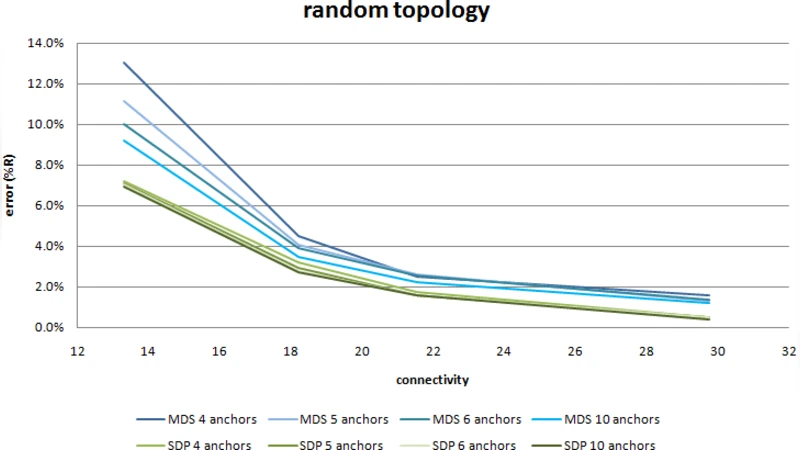
The experimental framework covers three network topologies—regular grid, uniform random, and clustered layouts—with node counts ranging from 100 to 500. For each topology the authors vary average node degree, anchor proportion (5 %–20 %), and measurement noise (Gaussian with σ = 0.1, 0.3, 0.5). MDS is implemented with a standard double‑centering step, followed by a Procrustes transformation using the known anchors. SDP solutions are obtained via the CVX modeling environment coupled with the SeDuMi solver. Performance metrics include root‑mean‑square error (RMSE) of estimated positions, execution time, and peak memory usage.
Results show that SDP consistently achieves lower RMSE than MDS, especially under high‑noise conditions. For example, in a random deployment with σ = 0.5, SDP attains an RMSE of about 0.09 m whereas MDS yields roughly 0.22 m. However, the runtime for SDP is an order of magnitude larger, and memory requirements exceed 8 GB for the 500‑node case, making it impractical for real‑time or resource‑constrained scenarios. Both methods benefit from well‑distributed anchors; when anchors are clustered or scarce (<10 % of nodes), MDS suffers severe distortion, while SDP remains comparatively stable but still incurs higher computational cost.
To aid designers in selecting an appropriate technique, the authors introduce a three‑dimensional Pareto chart that visualizes the trade‑off among accuracy, computational complexity, and scalability. The chart clearly positions MDS as the preferred choice for low‑power, large‑scale deployments where moderate accuracy suffices, whereas SDP is recommended for applications demanding high precision and where sufficient processing resources are available.
The paper concludes with several avenues for future work: (1) hybrid schemes that use MDS outputs as initial guesses for SDP to accelerate convergence, (2) distributed SDP algorithms to improve scalability, and (3) extensions to non‑line‑of‑sight (NLOS) distance models. By providing quantitative evidence of each method’s strengths and limitations, the study offers practical guidance for engineers tasked with implementing localization in diverse WSN environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment