Design and locomotion control of soft robot using friction manipulation and motor-tendon actuation
Robots built from soft materials can alter their shape and size in a particular profile. This shape-changing ability could be extremely helpful for rescue robots and those operating in unknown terrains and environments. In changing shape, soft materials also store and release elastic energy, a feature that can be exploited for effective robot movement. However, design and control of these moving soft robots are non-trivial. The research presents design methodology for a 3D-printed, motor-tendon actuated soft robot capable of locomotion. In addition to shape change, the robot uses friction manipulation mechanisms to effect locomotion. The motor-tendon actuators comprise of nylon tendons embedded inside the soft body structure along a given path with one end fixed on the body and the other attached to a motor. These actuators directly control the deformation of the soft body which influences the robot locomotion behavior. Static stress analysis is used as a tool for designing the shape of the paths of these tendons embedded inside the body. The research also presents a novel model-free learning-based control approach for soft robots which interact with the environment at discrete contact points. This approach involves discretization of factors dominating robot-environment interactions as states, learning of the results as robot transitions between these robot states and evaluation of desired periodic state control sequences optimizing a cost function corresponding to a locomotion task (rotation or translation). The clever discretization allows the framework to exist in robot’s task space, hence, facilitating calculation of control sequences without modeling the actuator, body material or details of the friction mechanisms. The flexibility of the framework is experimentally explored by applying it to robots with different friction mechanisms and different shapes of tendon paths.
💡 Research Summary
This paper presents an integrated design and control methodology for a soft robot that achieves terrestrial locomotion by manipulating friction through shape change and by using motor‑tendon actuation. The robot is fabricated with a multi‑material PolyJet 3‑D printer (Stratasys Connex 500) that simultaneously deposits a soft elastomer (TangoPlus, Shore A 26‑28) and a rigid polymer (VeroClear, Shore D 83‑86). The soft body is a rectangular slab reinforced with horizontal ribs to create anisotropic bending stiffness and to limit strain during large deformations. Two brushless Maxon motors, each mounted in a hard capsule at the robot’s ends, wind nylon fishing‑line tendons that run through internal channels embedded in the body. By shortening the tendons the body bends asymmetrically, generating a normal‑force gradient along the width that translates into a friction gradient with the ground.
The path of each tendon is deliberately shaped (a sigmoid curve) and designed using static stress analysis in Autodesk Inventor. The analysis treats the displacement gradient in the vertical (Z) direction as proportional to the normal force, allowing the designer to predict how different tendon trajectories will affect the body’s deformation and consequently the friction distribution. To protect the soft matrix from the hard nylon and to improve force transmission, the tendon channels are coated with the rigid material, a design concept analogous to Bowden‑cable housings.
Two distinct friction‑manipulation mechanisms are integrated at the robot’s contact points. The “virtual‑grip” mechanism exploits the difference in static friction coefficients between the soft material (μ≈0.68) and the hard material (μ≈0.28). As the robot bends, the contact angle ψ between the body surface and the ground changes; when ψ exceeds a critical angle ψ* the contact switches from the soft to the hard material, thereby reducing friction at that end. This creates a controllable high‑low friction transition without any additional actuators. The second mechanism uses unidirectional clutches (free‑wheel style). The clutch transmits torque freely in the forward direction (low internal friction) but locks in the reverse direction, where the external roller‑pad’s friction is high. By selecting the rotation direction of the clutch, the robot can bias friction to favor forward or backward motion.
Control of the robot is approached from a model‑free perspective. Rather than building a detailed physics model of the highly nonlinear soft body, the authors discretize the dominant interaction variables—primarily the friction state of each contact point—into a finite set of “states.” Each state transition, triggered by a specific tendon actuation command, is experimentally observed and recorded as a displacement vector (Δx, Δθ). A database of state‑transition outcomes is thus constructed. For a given locomotion task (e.g., move forward a prescribed distance or rotate by a target angle), a cost function that penalizes deviation from the goal and energy consumption is defined. An optimization routine then searches the database for a periodic sequence of state transitions that minimizes the cost. Because the learning is purely experimental, the framework is independent of material properties, tendon geometry, or friction‑mechanism details; any new design can be incorporated by simply re‑collecting transition data.
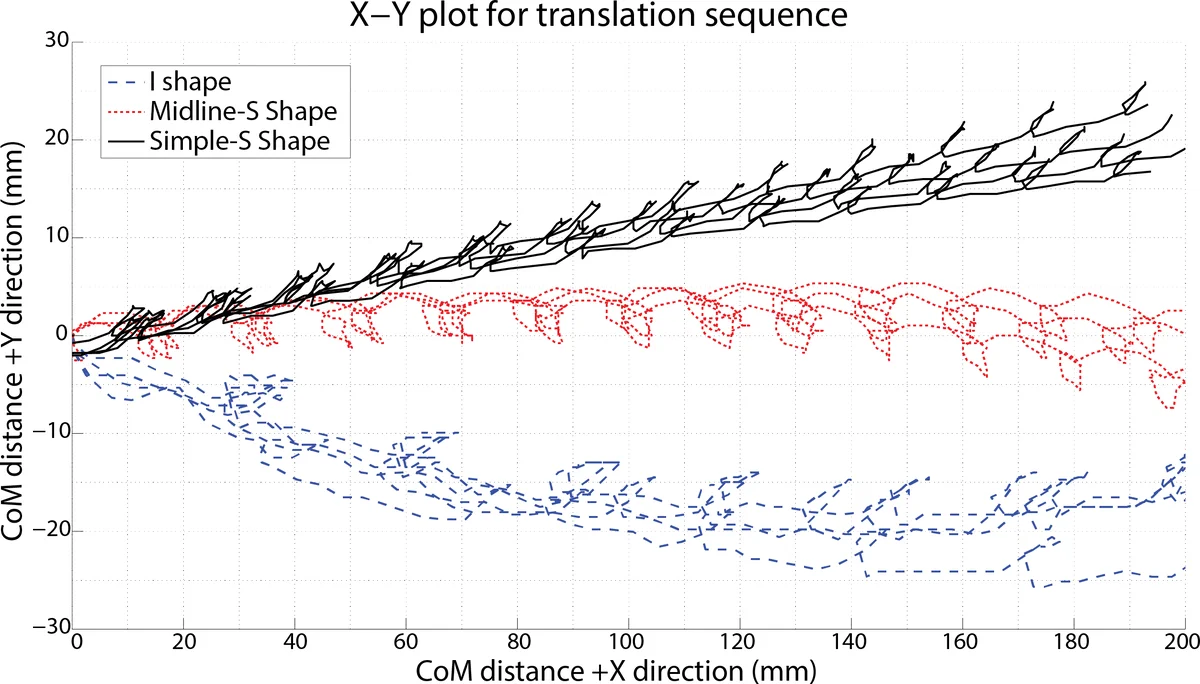
The authors validate the approach with three experimental prototypes: (1) a robot equipped with the virtual‑grip mechanism, (2) a robot equipped with the unidirectional clutch, and (3) a baseline robot without specialized friction devices. Tests are performed on smooth and rough surfaces. Results show that the tendon‑path design strongly influences the normal‑force gradient and thus the locomotion efficiency. The model‑free controller achieves the desired displacement with an average error below 5 % and consumes roughly half the power of earlier SMA‑driven soft robots. Moreover, the same control algorithm successfully generates effective gaits for both friction mechanisms, demonstrating the method’s versatility.
In summary, the paper contributes: (i) a rapid, modular fabrication workflow for soft robots using multi‑material 3‑D printing; (ii) a systematic tendon‑path design method based on static stress analysis; (iii) two passive friction‑control strategies that rely solely on body deformation; (iv) a discrete‑state, model‑free learning controller that can synthesize optimal locomotion sequences without explicit dynamic modeling; and (v) experimental evidence of the framework’s applicability across different robot morphologies and surface conditions. Future work is suggested to extend the approach to three‑dimensional terrains, increase the number of discrete contact points, and incorporate online adaptation for real‑time environmental changes.
Comments & Academic Discussion
Loading comments...
Leave a Comment