The configuration space of equilateral and equiangular hexagons
We study the configuration space of equilateral and equiangular spatial hexagons for any bond angle by giving explicit expressions of all the possible shapes. We show that the chair configuration is isolated, whereas the boat configuration allows one…
Authors: Jun OHara
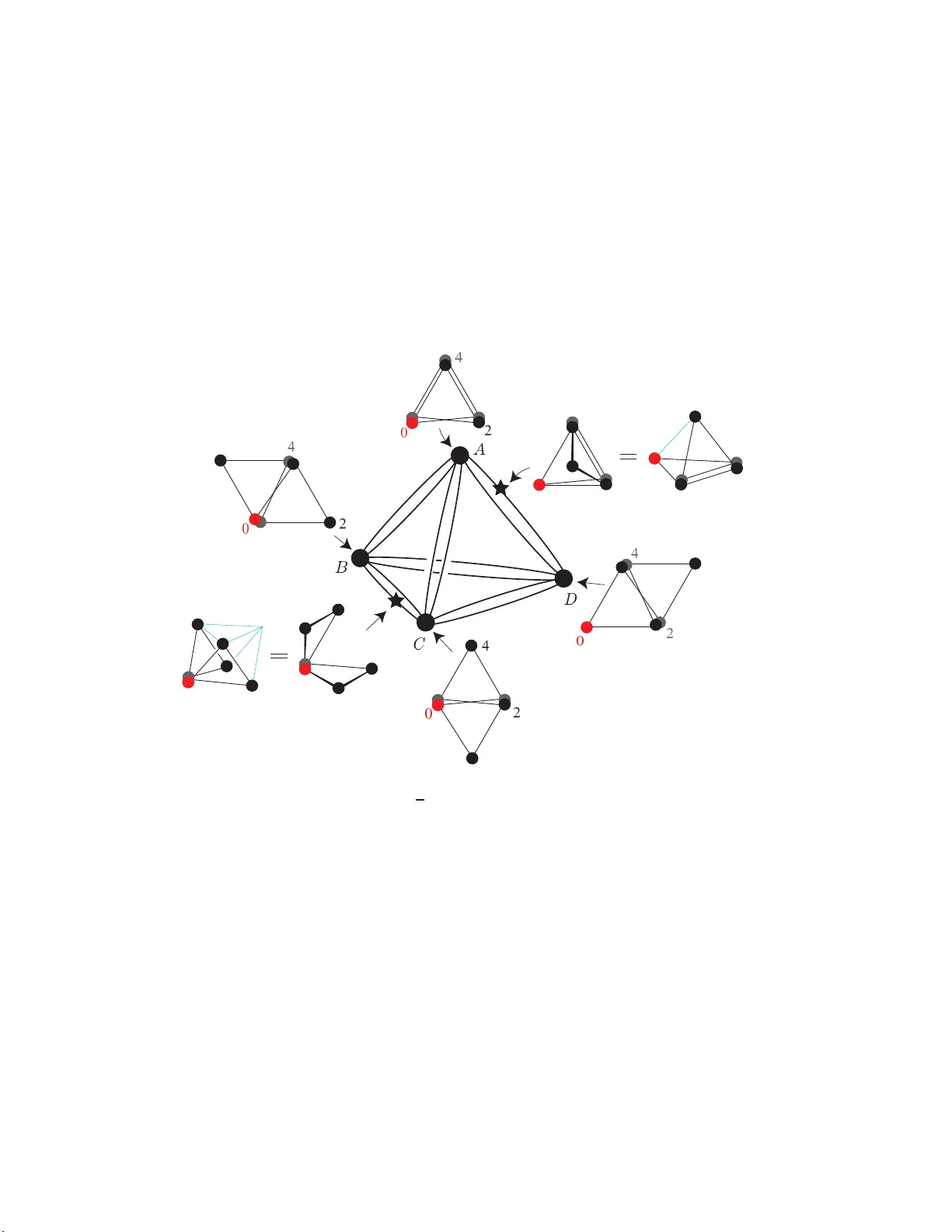
The configuration s pa ce of equilateral a nd equi a ngular hexagons Jun O’Hara No v em ber 11, 2021 Abstract W e study the configuration space of equ ilateral and equiangular spatial hexagons for any b ond angle by giving explicit expressions of all the p ossible shap es. W e sho w that the chair configuration is isolated, whereas th e b oat configuration allo ws one-dimensional deformatio ns whic h form a circle in the configuration space. Key wor ds and phr ases . Configuration space, equiangular, polygon. 2000 Mathematics Subje ct Classific ation. Primary 51N20; Second ary 51H99, 55 R80 1 In tro duction Let P be a p o ly gon wit h n vertices in R 3 . W e expre ss P by its vertices, P = ( P 0 , P 1 , · · · , P n − 1 ), with suffixes mo dulo n . A polyg on P is called e quilater al if the edge length | P i +1 − P i | is cons ta n t, and e quiangular if the angle ∠ P i − 1 P i P i +1 is cons tant. T his angle betw een tw o adjacent edg es is called the b ond angle and will b e denote by θ in this pap er. An equilateral and eq uiangular po lygon ca n b e considered as a mathematical mo del o f a cyclo alk ane . W e are in terested in the set of a ll the p ossible shap es (which are called conformations in chemistry) of cycloalk anes when the n um b er n of car b ons and the b ond angle θ is fixed, i.e. in the language of mathematics, the configuratio n space of equilater al and equiangular p oly gons. Gordon Crippen studied it for n ≤ 7 ([C]). T o be precise, what he obtained is not the configuration space itself, but the s pace of the “ metric matrices ”, whic h are n × n matrices whose en tries ar e inner pro ducts of pairs of edge vectors, and then he gav e the co r resp onding conformations. When n = 4 (cyclobutanes) and n = 5 (cyclop entanes) he cons idered all the po ssible bo nd angles, but when n = 6 (cyclohexanes) and n = 7 (cyc lo p e n tanes) he fixed the bond angle to b e the ideal tetrahedral bond ang le cos − 1 ( − 1 3 ) ≈ 1 0 9 . 47 ◦ (Figure 1). He showed that if n = 6 the conformation space is a union of a circle which con tains a b o at (Figur e 2) a nd an isolated po int of a chai r (Figure 3), and that if n = 7 it consists of t wo circles, o ne for boat/twist-bo at and the other for c hair/twist-chair. In these t wo c a ses, he sho wed it by searching out all the po ssible v alues of the entries of the metric matrix thro ugh numerical exp er iment with 0.0 5 step size. Figure 1 : θ = cos − 1 ( − 1 3 ) Figure 2 : b o at Figure 3 : chair In this pap er we study the configuratio n spa ce of hexagons for a ny b ond angle. W e give explicit expressions of all the po ssible co nfigurations in terms of our pa rameters illustrated in Figure 8 . W e show that the topo logical type of the c o nfiguration spa c e dep ends on the bond a ngle θ . 1 If θ is big ( π 3 < θ < 2 π 3 ) the situation is same as that o f cyclo hexanes of idea l tetra hedral b ond angle studied b y Cr ippe n. On the other hand, if θ is s ma ll (0 < θ < π 3 ), a new configura tion (“ inw ard cr own ” illustrated in Figur e 11) app e a rs, and the one dimensiona l contin uum of deformatio n of a b oat is div ided int o tw o pieces, which implies that we cannot deform a boat into its mirr or image. W e remar k that we dis ting uish vertices in our study . Hence our configura tion s pace is not equal to the s pace of shap es. W e hav e a n exceptional case if θ = π 3 , when the inw ard cr own, which degenerates to a doubly cov ered triangle, c an b e deformed to boats via newly appear ed families o f configura tions. In any cas e, a chair is an isola ted co nfiguration, wherea s a boat allows one - dimensional deformatio ns starting fr om and ending at it. Moving pictures of deforma tion of a b oat ca n be found at http:/ /www. comp.tmu.ac.jp/knotNRG/math/configuration.html Of course, as extremal cases, we hav e a 6 times cov ered multple edge and a reg ular hexagon when θ = 0 , 2 π 3 . There hav e b een a grea t n umber of studies of the configura tion spaces of linkages . An excelle n t survey can b e fo und in [D-OR]. If we dro p the conditio n of being equiang ular, it is known tha t the space o f equilateral polygo ns has a symplectic structur e ([Kp-M]). This pap er is based on the author’s talk at “ Knots and soft-matter physics, T op ology of po lymers and related topics in physics, mathematics and biolog y”, YITP , Kyoto, 200 8 (A short announcement of the r e s ult without pro of was r ep orted in Bussei Kenky uu vol. 92 (20 09) 119 – 122). Notations . Throughout the pap er, we a gree that C = cos( θ 2 ) and S = sin( θ 2 ). The s uffixes are understo o d mo dulo n . The angle ∠ P i means ∠ P i − 1 P i P i +1 . 2 Preliminaries Definition 2.1 Put f M n ( θ ) = P = ( P 0 , . . . , P n − 1 ) ( P i ∈ R 3 ) | P i − P i +1 | = 1 , ∠ P i − 1 P i P i +1 = θ ( ∀ i (mo d. n )) . Let G be the group of orientation pre s erving isometries of R 3 . Put M n ( θ ) = f M n ( θ ) / G , and call it the c onfigu r ation sp ac e of θ -e quiangular unit e quilater al n -gons (0 ≤ θ < π ). Let us denote the equiv alence class o f a plolygon P by [ P ]. Remark 2.2 (1) W e allow in tersections o f edges and ov erlapping of vertices. (2) W e distinguish the vertices w he n we consider our configura tion s pace. Ther efore, tw o configurations illustrated in Figures 3 corresp ond to differ ent p oints in M 6 , a lthough their shap es ar e the same. (3) When w e ex press an eq uila teral and equia ngular p olygon we may fix the first three vertices, P 0 , P 1 , and P 2 . There are ( n − 3 ) more vertices, wher eas we hav e ( n − 2) co nditions for the lengths of the edges, and ( n − 1) conditions for the ang le s . Therefore, we ma y exp e ct that the dimension of M n ( θ ) is equa l to 3( n − 3) − ( n − 2) − ( n − 1) = n − 6 in genera l if the conditions are indep endent, which is not the c a se when n ≤ 6 as we will see. When n ≤ 5 the co nfiguration space is given as follows. Prop ositio n 2.3 ([C]) The c onfigu r ation sp ac es M n ( θ ) of e quilater al and θ -e quiangular n -gons ( n = 3 , 4 , 5) and the shap es of p olygons which c orr esp ond to t he elements ar e given by the fol lowing. M 3 ( θ ) ∼ = { 1 p oint } ( θ = π 3 ) regular tr ia ngle ∅ otherwise M 4 ( θ ) ∼ = { 1 p oint } ( θ = 0) 4-folded edg e (Figure 5 left) { 2 p oints } (0 < θ < π 4 ) folded rhom bus (Figure 5 center) and its mirror image { 1 p oint } ( θ = π 4 ) square (Figure 5 rig ht ) ∅ otherwise, M 5 ( θ ) ∼ = { 1 p oint } ( θ = π 5 ) regular star shape (Figure 6) { 1 p oint } ( θ = 3 π 5 ) regular p entagon (Figure 7) ∅ otherwise. 2 Figure 4 : A chair when θ is small and its mirr or image Figure 5 : n = 4 ca se. The middle is a non-planar config ur ation. Figure 6 : Regula star shape Figure 7 : Regular p entagon Pro of. The cases when n = 3 , 4 are obvious. Suppo se n = 5. Let ( P 0 , . . . , P 4 ) ∈ f M 5 ( θ ). Then θ 6 = 0 , π . W e may assume, after a motion of R 3 , that P 0 = (0 , 0 , 0) , P 1 = (1 , 0 , 0), and P 4 = (co s θ , sin θ , 0). Then P 2 and P 3 can be expressed by P 2 = 1 − cos θ sin θ cos ϕ 2 sin θ sin ϕ 2 , P 3 = cos θ sin θ 0 sin θ − cos θ 0 0 0 1 1 − cos θ sin θ cos ϕ 3 sin θ sin ϕ 3 for some ϕ 2 and ϕ 3 . Using sy mmetry in a plane that contains the angle bisector of ∠ P 1 P 0 P 4 and the z -axis, we can deduce from | P 2 P 4 | 2 = | P 1 P 3 | 2 = 2 sin θ 2 2 that cos ϕ 2 = co s ϕ 3 = 1 − 2 cos θ + 2 cos 2 θ 2 sin 2 θ , which implies sin ϕ 2 = ± sin ϕ 3 . Then − − − → P 1 P 2 · − − − → P 2 P 3 = − cos θ implies − 4 cos 2 θ + 2 cos θ + 1 4(1 − cos θ ) = sin 2 θ sin ϕ 2 (sin ϕ 2 − sin ϕ 3 ) . (2.1) 3 It follo ws that, whether sin ϕ 2 = sin ϕ 3 or sin ϕ 2 = − sin ϕ 3 , cos θ = 1 ± √ 5 4 , namely , θ = π 5 , 3 π 5 , and ϕ 2 = ϕ 3 = 0, which means only r egular star shap e and reg ula r pentagon can app e ar as equilater al and equiangular p entagons. ✷ 3 Equilateral and equiangular h exagons Put C = cos( θ 2 ) and S = sin( θ 2 ). First note that P 0 , P 2 , and P 4 form a regular triangle of edge length 2 S . W e ma y fix P 0 = − S 0 0 , P 2 = S 0 0 , P 4 = 0 √ 3 S 0 . (3.1) An y element in M 6 ( θ ) has exactly one representativ e hexagon with P 0 , P 2 , and P 4 being a s ab ove. Let us us e a “ double cone ”o r susp ension ex pr ession o f a hexagon (Figur e 8), namely , we express P 1 , P 3 , a nd P 5 by Figure 8 : Double cone or susp ension expression P 1 = 0 − C cos ϕ 1 C sin ϕ 1 , P 3 = 1 2 S + √ 3 2 C cos ϕ 3 √ 3 2 S + 1 2 C cos ϕ 3 C sin ϕ 3 , P 5 = − 1 2 S − √ 3 2 C cos ϕ 5 √ 3 2 S + 1 2 C cos ϕ 5 C sin ϕ 5 (3.2) for some ϕ 1 , ϕ 3 , and ϕ 5 . Now the c o nditions | P j − P j +1 | = 1 ( ∀ j ) a nd ∠ P 1 = ∠ P 3 = ∠ P 5 = θ ar e satisfied. The condition ∠ P i +1 = θ ( i = 1 , 3 , 5) is equiv alent to C 2 (cos ϕ i cos ϕ i +2 − 2 sin ϕ i sin ϕ i +2 ) + √ 3 S C (cos ϕ i + cos ϕ i +2 ) = 3 − 5 C 2 , (3.3) which is equiv alen t to C C cos ϕ i + √ 3 S cos ϕ i +2 − 2 C 2 sin ϕ i sin ϕ i +2 = 3 − 5 C 2 − √ 3 S C cos ϕ i . (3.4) Remark that the equations ax + b y = d ( a 2 + b 2 > 0) and x 2 + y 2 = 1 hav e solutions if and only if a 2 + b 2 − d 2 ≥ 0, when we hav e x = ad ± b √ a 2 + b 2 − d 2 a 2 + b 2 , y = bd ∓ a √ a 2 + b 2 − d 2 a 2 + b 2 . (3.5) In o ur case (3.4), b y substituting a = C C cos ϕ i + √ 3 S , b = − 2 C 2 sin ϕ i , d = 3 − 5 C 2 − √ 3 S C cos ϕ i , (3.6) 4 we have a 2 + b 2 = 4 − ( S − √ 3 C cos ϕ i ) 2 , which is positive unless θ = π 3 and ϕ i = π , and a 2 + b 2 − d 2 = − √ 3 C cos ϕ i − √ 3 S √ 3 C cos ϕ i − (3 − 8 C 2 ) S . (3.7) It follows tha t when ( θ, ϕ 1 ) 6 = ( π 3 , π ) there ar e ϕ 3 and ϕ 5 so that ∠ P 0 = ∠ P 2 = θ if and only if cos ϕ 1 satisfies (3 − 8 C 2 ) S √ 3 C ≤ co s ϕ 1 ≤ √ 3 S C , which can happ en if and only if C = cos θ 2 ≥ 1 2 , i.e. 0 ≤ θ ≤ 2 π 3 (Figure ). Figure 9 : The reg ion of cos ϕ 1 so that there are ϕ 3 and ϕ 5 satisfying ∠ P 0 = ∠ P 2 = θ (1) Let us first assume that θ and ϕ 1 satisfy the conditions ab ov e men tioned and search for the case when ϕ 3 and ϕ 5 that make ∠ P 0 = ∠ P 2 = θ also s a tisfy ∠ P 4 = θ . (W e will study the cas e when ( θ, ϕ 1 ) = ( π 3 , π ) later.) W e hav e tw o ca ses, either ϕ 3 6 = ϕ 5 or ϕ 3 = ϕ 5 . Case I. Assume ϕ 3 6 = ϕ 5 . Remar k that this can o ccur if and only if ϕ 1 satisfies (3 − 8 C 2 ) S √ 3 C < co s ϕ 1 < √ 3 S C 0 < θ < 2 π 3 . Then the conditions ∠ P 0 = ∠ P 2 = θ imply that ϕ 3 and ϕ 5 are g iven by { (cos ϕ 3 , sin ϕ 3 ) , (cos ϕ 5 , sin ϕ 5 ) } = ( ad ± b √ a 2 + b 2 − d 2 a 2 + b 2 , bd ∓ a √ a 2 + b 2 − d 2 a 2 + b 2 !) , (3.8) where a, b , and d are given by (3.6). Computating the left ha nd side of (3.3), we have C 2 a 2 d 2 − b 2 ( a 2 + b 2 − d 2 ) ( a 2 + b 2 ) 2 − 2 b 2 d 2 − a 2 ( a 2 + b 2 − d 2 ) ( a 2 + b 2 ) 2 ! + √ 3 S C 2 ad a 2 + b 2 = 3 − 5 C 2 , which implies tha t the condition ∠ P 4 = θ is alwa ys satisfied in this case. Now (3 .2 ) shows tha t P 3 and 5 P 5 are g iven by P 3 = S − √ 3 C cos ϕ 1 − (3 − 8 C 2 ) S ± √ 3 C sin ϕ 1 √ a 2 + b 2 − d 2 4 − ( S − √ 3 C cos ϕ i ) 2 2 √ 3 S − C cos ϕ 1 − 1 √ 3 (3 − 8 C 2 ) S ± C sin ϕ 1 √ a 2 + b 2 − d 2 4 − ( S − √ 3 C cos ϕ i ) 2 − 2 C 3 − 5 C 2 − √ 3 S C cos ϕ 1 sin ϕ 1 ± C cos ϕ 1 + √ 3 S √ a 2 + b 2 − d 2 4 − ( S − √ 3 C cos ϕ i ) 2 P 5 = − S + √ 3 C cos ϕ 1 − (3 − 8 C 2 ) S ∓ √ 3 C sin ϕ 1 √ a 2 + b 2 − d 2 4 − ( S − √ 3 C cos ϕ i ) 2 2 √ 3 S − C cos ϕ 1 − 1 √ 3 (3 − 8 C 2 ) S ∓ C sin ϕ 1 √ a 2 + b 2 − d 2 4 − ( S − √ 3 C cos ϕ i ) 2 − 2 C 3 − 5 C 2 − √ 3 S C cos ϕ 1 sin ϕ 1 ∓ C cos ϕ 1 + √ 3 S √ a 2 + b 2 − d 2 4 − ( S − √ 3 C cos ϕ i ) 2 , (3.9) where a 2 + b 2 − d 2 is g iven by (3.7). Case I I. Assume ϕ 3 = ϕ 5 . Let us first s tudy the condition for ∠ P 4 = θ without assuming ∠ P 0 = ∠ P 2 = θ . If ϕ 3 = ϕ 5 , which we deno te by ϕ , a nd ∠ P 4 = θ , then (3.3) implies that ϕ must satisfy cos ϕ = − √ 3 S C or S √ 3 C . Case I I-1 . Assume (cos ϕ 3 , sin ϕ 3 ) = (cos ϕ 5 , sin ϕ 5 ) = S √ 3 C , √ 4 C 2 − 1 √ 3 C ! . Then (3.3) implies that ∠ P 0 = ∠ P 2 = θ if and only if (cos ϕ 1 , sin ϕ 1 ) = S √ 3 C , √ 4 C 2 − 1 √ 3 C ! or (3 − 8 C 2 ) S √ 3 C , (4 C 2 − 3) √ 4 C 2 − 1 √ 3 C ! . Note that we have − − − → P 0 P 5 = − − − → P 2 P 3 by (3.2). The p o ints P 1 and P 4 are in the opp osite (or same) side of the pla ne containing P 0 , P 2 , P 3 , and P 5 if co s ϕ 1 = S √ 3 C (or r esp ectively cos ϕ 1 = (3 − 8 C 2 ) S √ 3 C ). Namely , the hexagon is a chair if ϕ 1 = ϕ 3 = ϕ 5 and a boa t if ϕ 1 6 = ϕ 3 = ϕ 5 in this case. Both coincide if and only if θ = 0 o r 2 π 3 , when P is a 6-times co vered multiple edge or a regular hexa gon. The c hair is giv en by P 1 = 0 − S √ 3 √ 4 C 2 − 1 √ 3 , P 3 = S 2 S √ 3 √ 4 C 2 − 1 √ 3 , P 5 = − S 2 S √ 3 √ 4 C 2 − 1 √ 3 , whereas the b oat is giv en by substituting (cos ϕ 1 , sin ϕ 1 ) = (3 − 8 C 2 ) S √ 3 C , (4 C 2 − 3) √ 4 C 2 − 1 √ 3 C to (3.9), P 1 = 0 − (3 − 8 C 2 ) S √ 3 (4 C 2 − 3) √ 4 C 2 − 1 √ 3 , P 3 = S 2 S √ 3 √ 4 C 2 − 1 √ 3 , P 5 = − S 2 S √ 3 √ 4 C 2 − 1 √ 3 . Case I I-2 . Assume (cos ϕ 3 , sin ϕ 3 ) = (cos ϕ 5 , sin ϕ 5 ) = − √ 3 S C , √ 4 C 2 − 3 C ! , 6 which can o ccur if and only if √ 3 2 ≤ C ≤ 1, namely , 0 ≤ θ ≤ π 3 . Then (3.3) implies that ∠ P 0 = ∠ P 2 = θ if and only if 2 C √ 4 C 2 − 3 sin ϕ 1 = 8 C 2 − 6 . Therefore, when θ 6 = π 3 (w e will study the case when θ = π 3 and ϕ 3 = ϕ 5 = π later ) then ∠ P 0 = ∠ P 2 = θ if and only if (cos ϕ 1 , sin ϕ 1 ) = − √ 3 S C , √ 4 C 2 − 3 C ! or √ 3 S C , √ 4 C 2 − 3 C ! . Note that P 3 and P 5 are above P 0 and P 2 resp ectively . When ϕ 1 = ϕ 3 = ϕ 5 the hexagon is an “inw ard crown” (Figur e 11) giv en by P 1 = 0 √ 3 S √ 4 C 2 − 3 , P 3 = − S 0 √ 4 C 2 − 3 , P 5 = S 0 √ 4 C 2 − 3 , whereas the other is given by substituting (co s ϕ 1 , sin ϕ 1 ) = √ 3 S C , √ 4 C 2 − 3 C to (3 .9), P 1 = 0 − √ 3 S √ 4 C 2 − 3 , P 3 = − S 0 √ 4 C 2 − 3 , P 5 = S 0 √ 4 C 2 − 3 . Let us summarize the argument ab ov e when θ 6 = π 3 . Theorem 3.1 Supp ose a θ - e qu iangular unit e qu ilater al hexagon ( θ 6 = π 3 ) is p ar ametrize d by the agnles ϕ 1 , ϕ 3 , and ϕ 5 by (3.1) , (3.2 ) . L et C = cos θ 2 and S = sin θ 2 as b efor e. (1) When θ = 2 π 3 i.e. C = 1 2 we have ϕ 1 = ϕ 3 = ϕ 5 = 0 , whi ch c orr esp onds to a r e gular hexagon. (2) When π 3 < θ < 2 π 3 i.e. 1 2 < C < √ 3 2 we have − arccos (3 − 8 C 2 ) S √ 3 C ≤ ϕ 1 ≤ a rccos (3 − 8 C 2 ) S √ 3 C . (i) When ϕ 1 = ± arccos (3 − 8 C 2 ) S √ 3 C we have ϕ 3 = ϕ 5 = ∓ arccos S √ 3 C , which c orr esp onds to a b o at (Figur e 2). (ii) When − ar ccos (3 − 8 C 2 ) S √ 3 C < ϕ 1 < a rccos (3 − 8 C 2 ) S √ 3 C we have either * ϕ 3 6 = ϕ 5 , which ar e given by (3.8) , * ϕ 1 = ϕ 3 = ϕ 5 = ± ar ccos S √ 3 C , which c orr esp onds t o a chair (Figur e 3). (3) When 0 < θ < π 3 i.e. √ 3 2 < C < 1 we have a rccos √ 3 S C ≤ | ϕ 1 | ≤ arcc o s (3 − 8 C 2 ) S √ 3 C . (i) When ϕ 1 = ± arccos (3 − 8 C 2 ) S √ 3 C we have ϕ 3 = ϕ 5 = ± arccos S √ 3 C , which c orr esp onds to a b o at (Figur e 10). (ii) When ϕ 1 = ± arccos √ 3 S C we have ϕ 3 = ϕ 5 = ± ar ccos − √ 3 S C = ± π − arccos √ 3 S C . (iii) When arc c o s √ 3 S C < | ϕ 1 | < a rccos (3 − 8 C 2 ) S √ 3 C we have either * ϕ 3 6 = ϕ 5 , which ar e given by (3.8) , * ϕ 1 = ϕ 3 = ϕ 5 = ± ar ccos S √ 3 C , which c orr esp onds t o a chair (Figur e 4). * ϕ 1 = ϕ 3 = ϕ 5 = ± ar ccos − √ 3 S C , which c orr esp onds to an “inwar d cr own ” (Figur e 11). (4) When θ = 0 the hexagon de gener ates t o a 6 times c over e d mult iple e dge. 7 Figure 1 0 : A boat w ith a s mall b ond angle Figure 11: “ inw ard crown ” in a prism. Two edges intersect each other in a side face of the prism. Corollary 3.2 The c onfigur ation sp ac e M 6 ( θ ) of θ -e quiangular unit e quilater al hexagons ( θ 6 = π 3 ) is home omorphic to a p oint if θ = 0 , 2 π 3 , the un ion of a cir cle and a p air of p oints if π 3 < θ < 2 π 3 , the un ion of two cir cles and four p oints if 0 < θ < π 3 , and the empty set if θ < 0 or θ > 2 π 3 . Bo at c onfigur ations ar e include d in cir cles ab ove mentione d, and chairs ar e isolate d. W e will see that a b o a t degenera tes to a planar co nfiguration when θ = π 3 . Corollary 3.3 (1) A b o at and its mirr or image c an b e joine d by a p ath in the c onfigur ation sp ac e, i.e. they c an b e c ontinu ously defo rme d fr om one to t he other, if and only if the b ond angle satisfies π 3 < θ < 2 π 3 . (2) A b o at and a chair c annot b e joine d by a p ath in the c onfigur ation s p ac e, i.e. they c annot b e c ontinu ously defo rme d fr om one to the other. (2) Finally we study the exceptional case θ = π 3 , when the cas es w he n ϕ j = π ( j = 1 , 3 , 5) hav e no t bee n co ns idered yet. When θ = π 3 the equa tion (3.3) beco mes (cos ϕ i + 1)(cos ϕ i +2 + 1) − 2 sin ϕ i sin ϕ i +2 = 0 . If ∠ P 2 = π 3 then ϕ 3 is deter mined by ϕ 1 as follows; • if ϕ 1 = π then ϕ 3 is a rbitrary , • if ϕ 1 = 0 then ϕ 3 = π , • if ϕ 1 6 = 0 , π then ϕ 3 = π or f ( ϕ 1 ) ( f ( ϕ 1 ) 6 = π ), where f ( ϕ ) ( ϕ 6 = ± π ) is given b y (cos f ( ϕ ) , sin f ( ϕ )) = − (cos ϕ + 1) 2 + 4 sin 2 ϕ (cos ϕ + 1) 2 + 4 sin 2 ϕ , 4 sin ϕ (cos ϕ + 1 ) (cos ϕ + 1) 2 + 4 sin 2 ϕ . (3.10) Remark that f (0) = π and that f ( ϕ ) = ϕ if and o nly if ϕ = ± ar ccos( 1 3 ). Put f ( π ) = 0 as lim ϕ → π f ( ϕ ) = 0. Theorem 3.4 Supp ose a π 3 -e qu iangular u nit e quilater al hexagon is p ar ametrize d by the agnles ϕ 1 , ϕ 3 , and ϕ 5 by (3.1) , (3.2) . Then we have { ϕ 1 , ϕ 3 , ϕ 5 } = { π , ϕ, f ( ϕ ) } , { π , π , ϕ } , or ± arcco s 1 3 , ± arcco s 1 3 , ± arcco s 1 3 , wher e ϕ is arbitr ary. The first c ase c ontains a b o at when { ϕ 1 , ϕ 3 , ϕ 5 } = { π , ± ar ccos 1 3 , ± arcco s 1 3 } , and the last triples c orr esp ond to a cha ir. Corollary 3.5 The c onfigur ation sp ac e M 6 ( π 3 ) of e quilater al and π 3 -e qu iangular hexagons is home omor- phic to the union of a p air of p oints and the sp ac e X il lustr ate d in Figur e 12 which is a 1 -skelton of a tetr ahe dr on with e dges b eing double d. The author would like to clo se the article with an op en problem: find a new inv arian which can show that a boa t canno t b e defo rmed contin uously into a chair. 8 Figure 12: The co nfiguration s pace X = M 6 ( π 3 ) \ { c hairs } . The num b e rs 0 , 2, and 4 in the figure indicate the vertices P 0 , P 2 , and P 4 resp ectively . The figur es of six hexag ons a round X are seen from a b ove. The non-planar co nfigurations left below is a b o at, when P i o ccupy five vertices of a regular o ctahedro n. The four vertices A, B , C , and D of X corres po nd to planar config urations parametrized by ( ϕ 1 , ϕ 3 , ϕ 5 ) = ( π , π , π ) , ( π , π , 0) , (0 , π, π ), and ( π, 0 , π ) r esp ectively . The cir cle throug h A and D consists of the config- urations parametrized b y ( ϕ 1 , ϕ 3 , ϕ 5 ) = ( π , ϕ, π ) ( − π ≤ ϕ ≤ π ). The circle hro ugh B and C consists of the co nfigurations par ametrized by ( ϕ 1 , ϕ 3 , ϕ 5 ) = ( ϕ, π , f ( ϕ )) ( − π ≤ ϕ ≤ π ). 9 References [C] Gordon M. Cripp en, Explo ring the c o nformation s pace of cycloalk anes by linear ized embedding. J. Comput. Chem., 1 3(3) (19 9 2), 351 – 361. [D-OR] E.D.Demaine and J. O’Ro urke, Geometric F olding Algorithms: Link a ges, Origami, Polyhedra. Cambridge Universit y P ress, (2007). [Kp-M] M. Ka povich and J. Millson, The symplectic ge o metry of po lygons in Euclidea n space. J. Different ial Geom. 44 (1996), 479 – 513. Department of Mathematics and Information Sciences, T o kyo Metrop olita n Universit y , 1-1 Mina mi-Ohsaw a, Ha chiouji-Shi, T okyo 1 92-03 97, JAP AN. E-mail: o hara@tmu.ac.jp F ax : 81 -42-6 77-24 81 10
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment