One-dimensional collision carts computer model and its design ideas for productive experiential learning
We develop an Easy Java Simulation (EJS) model for students to experience the physics of idealized one-dimensional collision carts. The physics model is described and simulated by both continuous dynamics and discrete transition during collision. In the field of designing computer simulations, we discuss briefly three pedagogical considerations such as 1) consistent simulation world view with pen paper representation, 2) data table, scientific graphs and symbolic mathematical representations for ease of data collection and multiple representational visualizations and 3) game for simple concept testing that can further support learning. We also suggest using physical world setup to be augmented complimentary with simulation while highlighting three advantages of real collision carts equipment like tacit 3D experience, random errors in measurement and conceptual significance of conservation of momentum applied to just before and after collision. General feedback from the students has been relatively positive, and we hope teachers will find the simulation useful in their own classes. 2015 Resources added: http://iwant2study.org/ospsg/index.php/interactive-resources/physics/02-newtonian-mechanics/02-dynamics/46-one-dimension-collision-js-model http://iwant2study.org/ospsg/index.php/interactive-resources/physics/02-newtonian-mechanics/02-dynamics/195-elastic-collision
💡 Research Summary
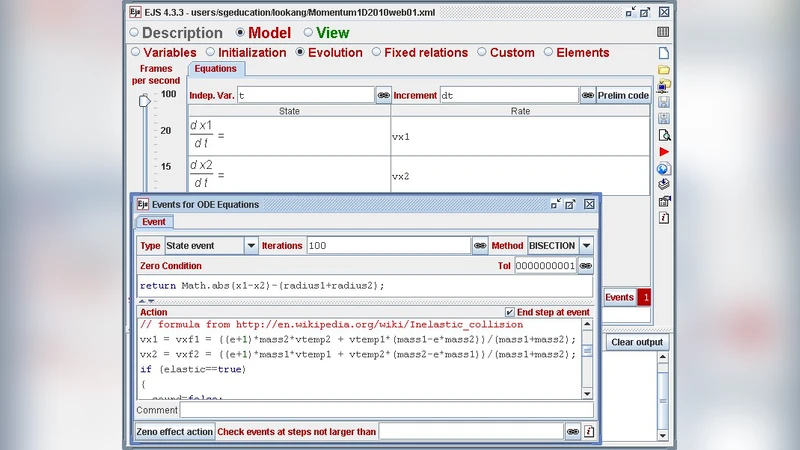
This paper presents an Easy Java Simulation (EJS) model that allows students to explore the physics of ideal one‑dimensional collision carts in a virtual environment. The authors describe a hybrid physics engine that treats the motion of each cart as continuous dynamics governed by Newton’s second law, while the instant of impact is handled as a discrete transition that enforces momentum conservation and, depending on the user’s choice, either elastic or inelastic energy conditions. By updating velocities and positions at the exact collision instant, the simulation reproduces the abrupt change observed in real‑world experiments.
Three pedagogical design principles guide the development. First, the simulation world‑view is kept consistent with the pen‑and‑paper representation found in textbooks; the same algebraic relations for pre‑ and post‑collision velocities appear on screen, reducing cognitive dissonance. Second, the interface supplies multiple representations simultaneously: an automatically populated data table, real‑time graphs of position‑versus‑time and velocity‑versus‑time, and symbolic equations (e.g., (m_{1}v_{1i}+m_{2}v_{2i}=m_{1}v_{1f}+m_{2}v_{2f})). This triad of visual, numerical, and symbolic cues supports deeper scientific reasoning. Third, a game‑like concept‑check module lets learners set masses, initial speeds, and collision type, then instantly receive feedback on whether the outcome complies with the conservation laws, thereby providing immediate formative assessment.
The authors also argue for complementary use of the virtual model with physical cart setups. Real equipment offers three‑dimensional tactile experience, random measurement errors, and the pedagogical value of confronting non‑ideal factors such as friction and air resistance. The simulation abstracts away these complications, allowing students to focus on the underlying idealized principles. By juxtaposing both modalities, learners can bridge the gap between the ideal model and real phenomena, especially when interpreting the discrete momentum‑conservation step as a momentary jump in measured data.
Student feedback collected through questionnaires and teacher interviews was largely positive. Learners praised the intuitive interface, instant graph generation, and the quiz‑style checks for reinforcing concepts. Some participants suggested adding input validation to prevent unit‑related mistakes and expanding the model to handle multiple successive collisions. These suggestions point to future enhancements such as robust error‑checking, user‑defined scenario libraries, and extended multi‑collision capabilities.
In summary, the study showcases a comprehensive approach to physics simulation design that integrates theory, visualization, interaction, and assessment. The four pillars—continuous‑discrete physics modeling, multi‑representation support, gamified evaluation, and alignment with hands‑on labs—work synergistically to create a productive experiential learning environment. The authors provide two publicly accessible EJS resources, encouraging educators to adopt and adapt the model for their curricula.