Analyzing the Utility of a Support Pin in Sequential Robotic Manipulation
Pick-and-place regrasp is an important manipulation skill for a robot. It helps a robot accomplish tasks that cannot be achieved within a single grasp, due to constraints such as kinematics or collisions between the robot and the environment. Previous work on pick-and-place regrasp only leveraged flat surfaces for intermediate placements, and thus is limited in the capability to reorient an object. In this paper, we extend the reorientation capability of a pick-and-place regrasp by adding a vertical pin on the working surface and using it as the intermediate location for regrasping. In particular, our method automatically computes the stable placements of an object leaning against a vertical pin, finds several force-closure grasps, generates a graph of regrasp actions, and searches for the regrasp sequence. To compare the regrasping performance with and without using pins, we evaluate the success rate and the length of regrasp sequences while performing tasks on various models. Experiments on reorientation and assembly tasks validate the benefit of using support pins for regrasping.
💡 Research Summary
This paper addresses a fundamental limitation of conventional pick‑and‑place regrasp strategies, which rely solely on flat surfaces for intermediate object placements. Because most objects have only a few stable poses on a plane, the resulting regrasp graph is sparsely connected, leading to low success rates and long manipulation sequences. The authors propose augmenting the workspace with a single vertical support pin and systematically exploiting the additional degrees of freedom it provides.
The method proceeds in three main stages. First, it generates all feasible intermediate placements by pairing each edge of the object’s convex hull with a uniformly sampled point on the object’s surface that could touch the pin. For each edge‑point pair, the algorithm solves a set of geometric constraints to locate the pin base on the plane, ensuring that the pin length is respected, the object does not intersect the pin, the placement is statically stable (center‑of‑mass projection lies inside the triangle formed by the edge and the pin base), and the friction cone condition is satisfied. Placements that pass these checks are retained, and among multiple candidates for the same edge the one with the highest center‑of‑mass is preferred because it maximizes free space for grasping.
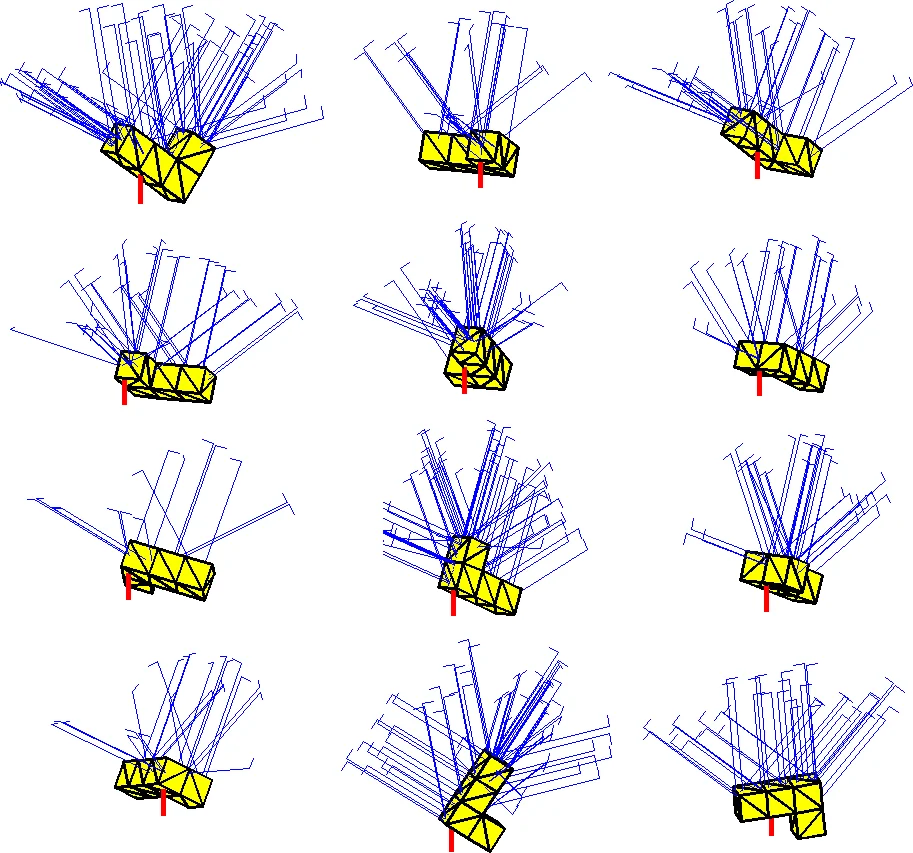
Second, a large set of force‑closure grasps is pre‑computed for the object without considering placement constraints. The authors use a parallel‑face sampling strategy adapted to a two‑finger adaptive gripper, generating grasps at multiple rotation angles around each face normal.
Third, for each validated placement the pre‑computed grasps are transformed into the world frame and filtered by collision, inverse‑kinematics feasibility, and torque limits. The resulting placement‑specific grasp sets are used to build a two‑layer regrasp graph: the upper layer connects different placements that share at least one common grasp, while the lower layer encodes feasible grasp transitions within a single placement. A shortest‑path search (similar to Dijkstra) on this graph yields a minimal‑length sequence of pick‑and‑place actions that moves the object from its initial to its goal pose.
Extensive experiments were conducted on a variety of mesh models, ranging from simple convex blocks to highly concave “pot‑lid” shapes. The pin length was varied between 5 mm and 30 mm, and the pin’s location relative to the robot was randomized. For each configuration, 100 trials with random initial and goal poses were executed, measuring both the success rate and the average number of regrasp steps. The results show a consistent improvement when the support pin is used: success rates increased from roughly 70 % (flat‑only) to over 90 % for most objects, and the average number of regrasp actions dropped from about 3.2 to 1.8. Objects that are difficult to reorient on a plane—such as lids that need to be flipped—benefited the most, with success rate gains exceeding 45 %. The study also identified an optimal pin length range; pins that are too short provide insufficient placement diversity, while overly long pins introduce new collision risks.
In conclusion, adding a vertical support pin dramatically expands the set of stable intermediate placements, thereby densifying the regrasp graph and enabling more efficient manipulation sequences. The authors suggest future work on multiple pins, dynamic pin placement optimization, and real‑time perception of pin contacts to further enhance the applicability of this approach in unstructured environments.
Comments & Academic Discussion
Loading comments...
Leave a Comment