A sufficient condition for the existence of plane spanning trees on geometric graphs
Let P be a set of n > 2 points in general position in the plane and let G be a geometric graph with vertex set P. If the number of empty triangles uvw in P for which the subgraph of G induced by {u,v,w} is not connected is at most n-3, then G contains a non-self intersecting spanning tree.
💡 Research Summary
The paper investigates a fundamental question in geometric graph theory: under what conditions does a geometric graph on a set of points in the plane contain a non‑self‑intersecting spanning tree, also known as a plane spanning tree? Let P be a set of n > 2 points in general position (no three collinear) and let G be a geometric graph whose vertex set is P. An “empty triangle” uvw is a triple of points whose convex hull contains no other point of P. For each empty triangle, consider the subgraph of G induced by its three vertices. If this induced subgraph is disconnected (i.e., at least one of the three possible edges is missing), the triangle is called a “bad” or “non‑connected” empty triangle.
The main theorem states that if the number of such non‑connected empty triangles is at most n − 3, then G necessarily contains a plane spanning tree. In other words, a linear bound on the number of “bad” empty triangles is sufficient to guarantee the existence of a non‑crossing spanning tree, regardless of the overall density or degree distribution of G.
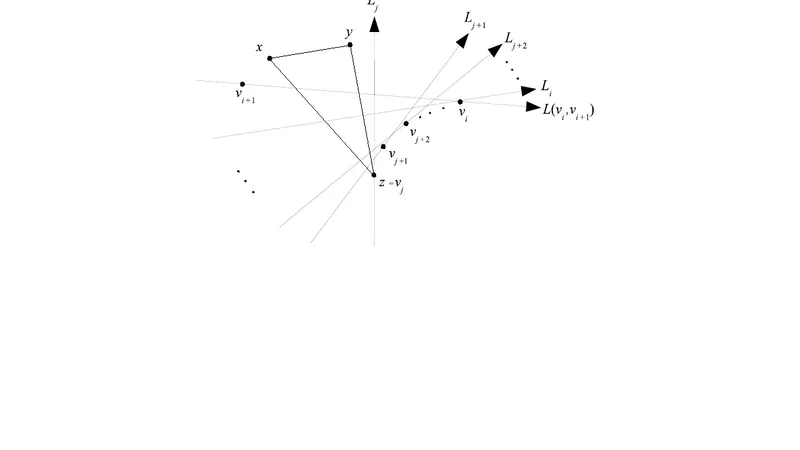
The proof proceeds by induction on n and uses an “ear‑removal” technique reminiscent of ear decompositions in planar graph theory. The base case n = 3 is trivial: the single empty triangle either already forms a connected three‑vertex subgraph (yielding a tree) or it does not, in which case the bound n − 3 = 0 forces the triangle to be connected. For the inductive step, assume the statement holds for all point sets of size k < n. The authors show that, under the hypothesis, there must exist a vertex v that participates in at most two bad empty triangles. This vertex can be treated as an “ear”: by removing v and all incident edges, the remaining graph still satisfies the same bound (the number of bad triangles drops by at most two, while the point set size drops by one). By the induction hypothesis, the reduced graph contains a plane spanning tree T′. Re‑inserting v and connecting it to the appropriate neighbor(s) in T′ yields a plane spanning tree of the original graph G, because the insertion can be performed inside the unique empty triangle that contains v and does not introduce any crossing.
A crucial combinatorial observation underlies the argument: the total number of empty triangles in a set of n points in general position is Θ(n²), but the condition limits the “defective” ones to a linear quantity. This disparity forces a large proportion of empty triangles to be fully present in G, which in turn guarantees the existence of a vertex with the required ear property. The authors also provide a tightness example: placing the points on a convex circle and connecting each point only to its two immediate neighbors yields exactly n bad empty triangles, violating the n − 3 bound and indeed lacking a plane spanning tree (the graph is a simple cycle, and any spanning tree obtained by deleting an edge would still intersect itself when drawn with straight‑line edges).
The significance of the result lies in its refinement of earlier sufficient conditions that relied on minimum degree or global connectivity. By focusing on local geometric configurations—empty triangles—the theorem captures subtle structural information that is invisible to purely combinatorial degree constraints. This makes the condition applicable to sparse graphs, to point sets with irregular distributions, and to algorithmic settings where one can efficiently count empty triangles (e.g., using range‑search data structures).
Potential applications include network design for wireless sensor deployments (where nodes correspond to points and edges must be drawn without interference), planar graph drawing algorithms that need to guarantee a crossing‑free spanning backbone, and motion planning for multi‑robot systems where a collision‑free communication tree is required. The paper also suggests directions for future work, such as extending the analysis to higher‑order empty convex polygons (empty quadrilaterals, pentagons) or exploring analogous conditions in three‑dimensional point sets. Overall, the work provides a clean, combinatorial‑geometric criterion that bridges local emptiness properties with global planar connectivity.
Comments & Academic Discussion
Loading comments...
Leave a Comment