A Discrete State Transition Algorithm for Generalized Traveling Salesman Problem
Generalized traveling salesman problem (GTSP) is an extension of classical traveling salesman problem (TSP), which is a combinatorial optimization problem and an NP-hard problem. In this paper, an efficient discrete state transition algorithm (DSTA) for GTSP is proposed, where a new local search operator named \textit{K-circle}, directed by neighborhood information in space, has been introduced to DSTA to shrink search space and strengthen search ability. A novel robust update mechanism, restore in probability and risk in probability (Double R-Probability), is used in our work to escape from local minima. The proposed algorithm is tested on a set of GTSP instances. Compared with other heuristics, experimental results have demonstrated the effectiveness and strong adaptability of DSTA and also show that DSTA has better search ability than its competitors.
💡 Research Summary
The paper proposes a novel discrete state transition algorithm (DSTA) specifically tailored for the Generalized Traveling Salesman Problem (GTSP). GTSP extends the classic TSP by grouping vertices into clusters; the solution must select exactly one vertex from each cluster and determine an optimal visiting order of the clusters, making the problem considerably more complex than TSP. Existing meta‑heuristics such as genetic algorithms, particle swarm, simulated annealing (SA), and ant colony optimization (ACO) have been adapted to GTSP, but they rely on traditional operators (swap, insert, etc.) that only modify a small number of vertices at a time, limiting their global search capability and making them prone to local minima.
The authors introduce three key innovations:
-
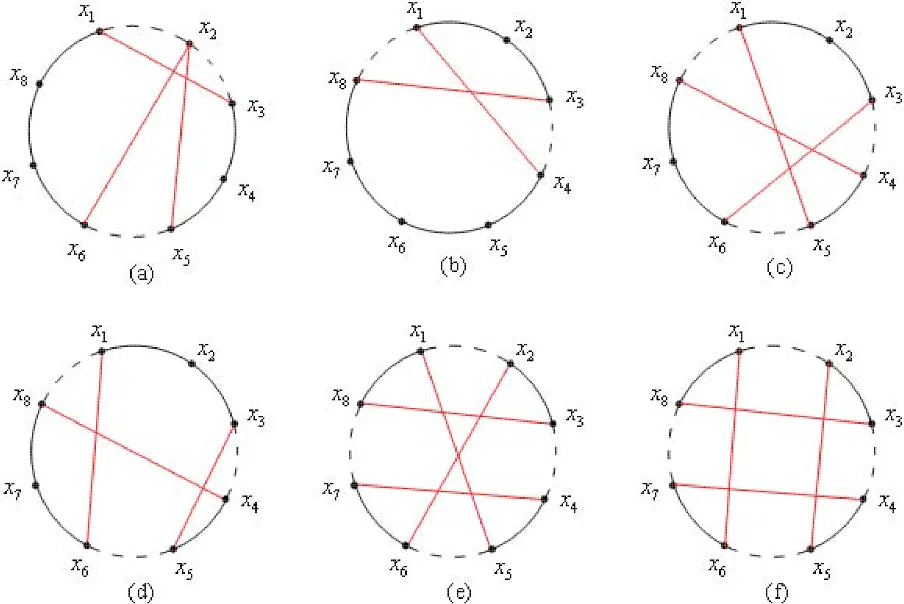
K‑Circle Operator – A new local search operator that splits the current tour into two “circles” (contiguous subsequences) at random, then removes one circle and inserts it into a random position of the other. This operation can realize up to six distinct cases (single‑vertex circle, interface swapping, non‑interface insertion, etc.), allowing simultaneous modification of many vertices and edges. Compared with swap, shift, and symmetry, K‑Circle dramatically expands the neighborhood size while preserving tour feasibility.
-
K‑Neighbor Heuristic – To guide the search toward promising regions, the authors define a correlation index rᵢⱼ based on Euclidean distances between cluster centroids, and a relevance measure pᵢⱼ = rᵢⱼ·rⱼᵢ normalized across all clusters. For each cluster i, the top‑k clusters with highest pᵢⱼ values constitute its K‑Neighbor set. This set is used as heuristic information for three K‑directed operators (k‑shift, k‑symmetry, k‑circle), biasing transformations toward edges that are statistically more likely to belong to high‑quality tours.
-
Double R‑Probability Update – Instead of a deterministic cooling schedule, the algorithm employs two probabilities: p₁ (risk) to accept a worse solution with a certain chance, and p₂ (restore) to revert to the best historical solution with another chance. This stochastic acceptance/recovery mechanism helps escape local minima while guaranteeing convergence by periodically restoring the best known solution.
The overall DSTA workflow proceeds as follows: start from an initial permutation of clusters, then iteratively apply swap, shift, k‑circle, k‑symmetry, and k‑shift operators. After each operator, a short‑segment cluster optimization (CO) is performed on at most five vertices surrounding the changed part, ensuring that the selected vertex within each affected cluster is locally optimal. The process repeats until a termination criterion (maximum iterations or stagnation) is met.
Experimental evaluation uses benchmark instances from GTSPLIB with 30 to 89 clusters. All algorithms (DSTA, SA, ACO) are implemented in MATLAB and run on an Intel Core i5 3.1 GHz processor under Windows XP. Parameter settings for DSTA are k = 8, mₐ = 2, m_b = 1; SA uses an initial temperature of 5000 and cooling rate 0.97; ACO uses α = 1, β = 5, ρ = 0.95. Ten independent runs are performed for each instance.
Results (Table 1) show that DSTA consistently outperforms SA and ACO both in solution quality and computational time. The average relative error Δ_avg for DSTA is typically below 0.2 % and often exactly zero, indicating that the algorithm reaches the known optimal solution in almost every run. In contrast, SA and ACO exhibit larger Δ_avg values (up to 15 % for some larger instances) and rarely achieve the optimal value. Moreover, DSTA’s runtime is substantially lower—often 30–70 % of the time required by SA or ACO—demonstrating its efficiency. The high success rate across diverse instance sizes confirms the robustness of the proposed operators and the guiding heuristic.
In conclusion, the paper demonstrates that augmenting DSTA with the K‑Circle operator, K‑Neighbor heuristic, and Double R‑Probability update yields a powerful meta‑heuristic for GTSP. The approach effectively balances exploration (through large‑scale circle moves and stochastic acceptance) and exploitation (through relevance‑driven neighbor selection and local CO). The authors suggest future work on adaptive parameter tuning, extension to asymmetric GTSP, and hybridization with other meta‑heuristics to further enhance performance.
Comments & Academic Discussion
Loading comments...
Leave a Comment