Simulations on Consumer Tests: Systematic Evaluation of Tolerance Ranges by Model-Based Generation of Simulation Scenarios
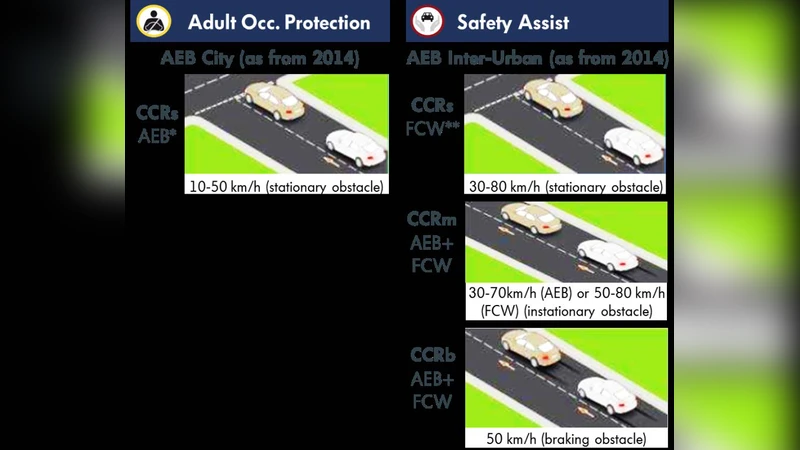
Context: Since 2014 several modern cars were rated regarding the performances of their active safety systems at the European New Car Assessment Programme (EuroNCAP). Nowadays, consumer tests play a significant role for the OEM’s series development with worldwide perspective, because a top rating is needed to underline the worthiness of active safety features from the customers’ point of view. Furthermore, EuroNCAP already published their roadmap 2020 in which they outline further extensions in today’s testing and rating procedures that will aggravate the current requirements addressed to those systems. Especially Autonomous Emergency Braking/Forward Collision Warning systems (AEB/FCW) are going to face a broader field of application as pedestrian detection or two-way traffic scenarios. Objective: This work focuses on the systematic generation of test scenarios concentrating on specific parameters that can vary within certain tolerance ranges like the lateral position of the vehicle-under-test (VUT) and its test velocity for example. It is of high interest to examine the effect of the tolerance ranges on the braking points in different test cases representing different trajectories and velocities because they will influence significantly a later scoring during the assessments and thus the safety abilities of the regarding car. Method: We present a formal model using a graph to represent the allowed variances based on the relevant points in time. Now, varying velocities of the VUT will be added to the model while the vehicle is approaching a target vehicle. The derived trajectories were used as test cases for a simulation environment. Selecting interesting test cases and processing them with the simulation environment, the influence on the system’s performance of different test parameters will be investigated.
💡 Research Summary
The paper addresses the growing importance of consumer safety tests, particularly those conducted by the European New Car Assessment Programme (EuroNCAP), for modern vehicles equipped with active safety systems such as Autonomous Emergency Braking (AEB) and Forward Collision Warning (FCW). With EuroNCAP’s 2020 roadmap expanding test scenarios to include pedestrian detection and two‑way traffic situations, manufacturers face increasingly stringent requirements. The authors focus on a systematic method to generate test scenarios that explore the impact of tolerance ranges—variations in parameters such as the lateral position of the Vehicle‑Under‑Test (VUT) and its approach speed—on the performance of AEB/FCW systems.
The core contribution is a formal graph‑based model that captures permissible variations at key temporal milestones during a test (e.g., detection of the target vehicle, activation of the braking algorithm, collision threshold). Nodes represent these milestones, while directed edges encode the allowable ranges of parameters (lateral offset, velocity, acceleration, etc.) as interval weights. By traversing the graph, a combinatorial space of test trajectories is defined, each corresponding to a specific set of tolerance values. This approach moves beyond traditional single‑parameter sensitivity studies, enabling simultaneous exploration of multiple, interacting tolerances.
To demonstrate the model, the authors extend it with discrete velocity levels (30 km/h, 40 km/h, 50 km/h) while varying lateral offset by ±0.1 m, ±0.2 m, and ±0.3 m. Each combination is automatically translated into input files for a high‑fidelity simulation environment that integrates a six‑degree‑of‑freedom vehicle dynamics model, realistic radar and camera sensor models, and a software‑in‑the‑loop implementation of the AEB/FCW control logic. The simulation runs generate quantitative data on braking initiation points, time‑to‑collision, and residual speed at impact.
Results reveal several key insights. First, for a given lateral offset, higher approach speeds significantly advance the braking initiation point, reducing the available stopping distance. In the most demanding case (50 km/h with ±0.3 m offset), the system’s reaction delay exceeds the EuroNCAP requirement of a 0.3 second pre‑brake window, indicating a potential loss of points. Second, the interaction between speed and offset is non‑linear: a modest offset at 40 km/h can produce a similar degradation in performance as a larger offset at 30 km/h, highlighting the importance of jointly considering these parameters during test design. Third, the graph model clearly delineates “risk regions” where the combination of tolerances leads to failure, and “safe regions” where the system meets the criteria. This visual and analytical separation allows test engineers to prioritize high‑risk scenarios for physical testing, thereby optimizing resource allocation.
Beyond the immediate findings, the methodology offers practical benefits for OEMs. By automating the generation of thousands of plausible test cases, manufacturers can conduct extensive virtual validation before committing to costly physical prototypes. The systematic coverage of tolerance space supports more robust algorithm tuning, helping to achieve higher EuroNCAP scores and, consequently, stronger market positioning. Moreover, because the graph‑based representation is abstract, it can be readily extended to upcoming EuroNCAP test items such as pedestrian detection, cyclist protection, and bidirectional traffic scenarios, ensuring long‑term applicability.
In summary, the paper presents a rigorous, graph‑driven framework for modeling tolerance ranges in consumer safety tests, couples it with a high‑fidelity simulation pipeline, and demonstrates how this combination yields actionable insights into AEB/FCW performance under realistic variability. The approach bridges the gap between test protocol specifications and practical system development, providing OEMs with a powerful tool to enhance safety functionality, meet evolving regulatory demands, and maintain competitive advantage in the marketplace.
Comments & Academic Discussion
Loading comments...
Leave a Comment