A Universal Point Set for 2-Outerplanar Graphs
A point set $S \subseteq \mathbb{R}^2$ is universal for a class $\cal G$ if every graph of ${\cal G}$ has a planar straight-line embedding on $S$. It is well-known that the integer grid is a quadratic-size universal point set for planar graphs, while the existence of a sub-quadratic universal point set for them is one of the most fascinating open problems in Graph Drawing. Motivated by the fact that outerplanarity is a key property for the existence of small universal point sets, we study 2-outerplanar graphs and provide for them a universal point set of size $O(n \log n)$.
💡 Research Summary
The paper addresses the long‑standing open problem of constructing sub‑quadratic universal point sets for planar graphs by focusing on the subclass of 2‑outerplanar graphs. A universal point set S for a graph class G is a set of points in the plane such that every n‑vertex graph in G can be drawn with straight‑line edges on distinct points of S without crossings. While any n‑point set in general position works for outerplanar graphs (k = 1), the case k = 2 has resisted previous attempts.
The authors first present a geometric construction of a point set S of size O(n³⁄²). They place N = n + √n points p₁,…,p_N uniformly on a half‑circle π. Each p_j is the centre of a small auxiliary circle π_j, and four line segments (s_N, s_+, s_−, and the radius) emanate from the centre. Points are classified as “dense” (√n of them) or “sparse” (the remaining). For a dense p_j they insert Θ(n) auxiliary points on the three segments; for a sparse p_j they insert Θ(√n) points. The total number of points is therefore (√n − 1)(3n + 1) + (n − 1)(3√n + 1) = O(n³⁄²).
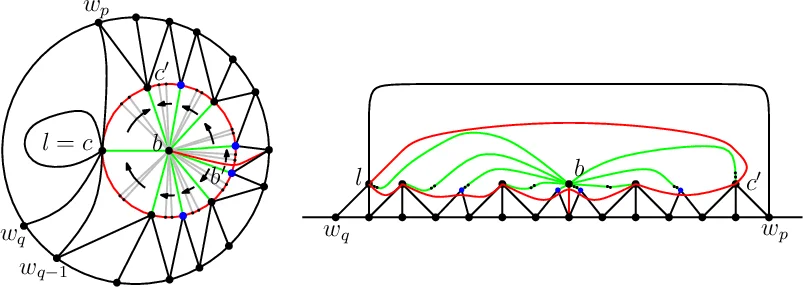
Crucially, the construction satisfies a set of visibility properties (Property 1). Roughly, from any point belonging to an earlier index set the rays to the current p_j encounter the auxiliary points in a prescribed clockwise order, and similarly for points belonging to later indices. These properties guarantee that when sub‑structures are placed inside the “wedges” defined by the auxiliary points, they will not intersect each other.
Next, the authors devise a labeling scheme that maps every vertex of a 2‑outerplanar graph to a label 1,…,|G|, where G is the outerplanar outer level. The outer vertices are labelled in the order they appear on the outer face. For each inner tree T that lies inside a face F of G, the algorithm extracts a “fork‑only” skeleton T₀ (vertices adjacent to three or more outer vertices). Traversing T₀ bottom‑up from the unique root adjacent to the two extreme vertices of F, each fork vertex a receives the label of a non‑extreme outer vertex w_{a_i} that it is adjacent to. All non‑fork vertices inherit the label of the nearest fork vertex on the path to the root. Lemma 1 shows that for any label i the induced subgraph H_i of all vertices with that label is a tree where every vertex has degree ≤2, except possibly one vertex of degree 3 (the fork).
The embedding proceeds in three steps.
- Weight assignment: For each outer vertex v_i, define ω(v_i) as the number of total vertices (outer plus inner) that carry label i. If ω(v_i) ≤ √n the vertex is “sparse”, otherwise “dense”. There are at most √n dense vertices.
- Outer level placement: Place the outer vertices on the N points of π in the same cyclic order as in the given planar embedding, respecting the dense/sparse classification. Property 2 guarantees that for any face F of G the interior of the polygon formed by its boundary points contains all auxiliary point sets S_j belonging to interior vertices of F, except the two extreme vertices.
- Inner trees placement: For each label i, embed the corresponding tree H_i inside the auxiliary point set S_j belonging to the outer vertex that carries label i. Because |H_i| + 1 = ω(v_i) ≤ |S_j|, there are enough points. The visibility guarantees (Property 1) ensure that edges of different H_i’s never cross, and the embedding of each H_i is planar by construction.
Section 3 proves that when every internal face of the outer level is a triangle and the inner level is a forest, the above scheme yields a planar straight‑line drawing on a point set of size O(n³⁄²). Section 4 relaxes the requirement that internal faces be triangles, allowing arbitrary polygonal faces while preserving the same embedding strategy. Section 5 finally handles the general case where the inner level may consist of several connected components that are not trees; the authors decompose each component into a bounded‑degree forest using tree‑width arguments (2‑outerplanar graphs have tree‑width ≤ 5) and apply the previous steps to each piece.
To reduce the O(n³⁄²) bound to O(n log n), the authors adapt the “super‑pattern” technique of Bannister et al. (2014). Instead of placing Θ(n) points on each dense wedge, they construct a hierarchical set of “patterns” that can accommodate any required number of vertices using only O(log n) points per wedge. By carefully merging the patterns across all wedges, the total number of points becomes O(n log n) while preserving all visibility properties.
The main theorem thus states: Every n‑vertex 2‑outerplanar graph admits a planar straight‑line embedding on a universal point set of size O(n log n). This is the first sub‑quadratic universal point set for a non‑trivial subclass beyond outerplanar graphs. The result also implies that any graph of tree‑width at most 5 (which includes 2‑outerplanar graphs) can be drawn on O(n log n) points.
The paper concludes with several open directions: extending the method to k‑outerplanar graphs for k ≥ 3, tightening the bound further (perhaps to linear), and investigating algorithmic aspects such as constructing the point set and embedding in near‑linear time. The work bridges a gap between the known linear bound for outerplanar graphs and the quadratic bound for general planar graphs, offering a promising pathway toward the ultimate goal of a sub‑quadratic universal point set for all planar graphs.
Comments & Academic Discussion
Loading comments...
Leave a Comment