10-Gabriel graphs are Hamiltonian
Given a set $S$ of points in the plane, the $k$-Gabriel graph of $S$ is the geometric graph with vertex set $S$, where $p_i,p_j\in S$ are connected by an edge if and only if the closed disk having segment $\bar{p_ip_j}$ as diameter contains at most $k$ points of $S \setminus {p_i,p_j}$. We consider the following question: What is the minimum value of $k$ such that the $k$-Gabriel graph of every point set $S$ contains a Hamiltonian cycle? For this value, we give an upper bound of 10 and a lower bound of 2. The best previously known values were 15 and 1, respectively.
💡 Research Summary
**
The paper investigates the Hamiltonicity of k‑Gabriel graphs, a family of proximity graphs defined on a set S of points in the Euclidean plane. In a k‑Gabriel graph (k‑GG(S)), two points p_i and p_j are joined by an edge if the closed disk having p_i p_j as its diameter contains at most k other points of S. The central question is: what is the smallest integer k such that k‑GG(S) contains a Hamiltonian cycle for every possible point set S?
Previously, it was known that k = 15 suffices (Abellanas et al., 2018) and that k = 1 does not always work. The authors improve the upper bound dramatically, proving that k = 10 is enough for all point sets, while also showing that k = 2 is necessary (i.e., there exist point sets whose 1‑GG is not Hamiltonian).
The proof follows the “minimal Hamiltonian cycle” technique introduced in earlier works. Let H be the set of all Hamiltonian cycles of the complete graph on S. For each cycle h ∈ H, define ds(h) as the list of its edge lengths sorted in decreasing order. Order the cycles lexicographically by ds(·) and pick a minimal element m. The goal is to show that every edge of m belongs to 10‑GG(S).
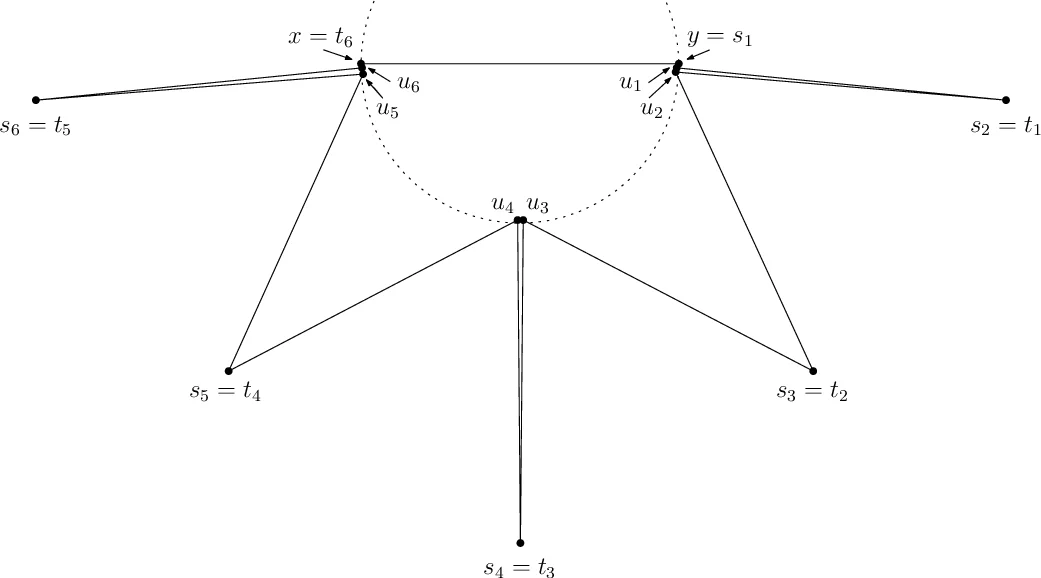
Fix an arbitrary edge e = xy of m. By an affine transformation we may assume x = (−1,0) and y = (1,0). Let U = {u₁,…,u_κ} be the points of S different from x, y that lie inside the diameter disk C‑DISC(x,y). The authors must prove κ ≤ 10.
To this end they introduce auxiliary points s_i (the predecessor of u_i along m) and t_i (the successor of u_i). A series of geometric inequalities is derived:
1. d(s_i, x) ≥ max{d(s_i, u_i), 2} (ensuring s_i lies outside the diameter disk); 2. d(s_i, s_j) ≥ max{d(s_i, u_i), d(s_j, u_j), 2}; 3. d(t_i, y) ≥ max{d(t_i, u_i), 2}; 4. d(t_i, t_j) ≥ max{d(t_i, u_i), d(t_j, u_j), 2}; 5. d(s_i, t_i) ≥ max{d(s_i, u_i), d(t_i, u_i), 2}; 6. d(s_i, t_j) ≥ max{d(s_i, u_i), d(t_j, u_j), 2}.
These inequalities guarantee that all s_i and t_i are at distance at least 2 from each other and from the endpoints x, y, except for trivial cases where a predecessor or successor coincides with x or y.
Next the authors construct a family of unit disks. For each s_i they define a unit disk D_i centered either at s_i (if ‖s_i‖ ≤ 3) or at the projection s_i′ of s_i onto the circle of radius 3 centered at the origin. Similarly, D₀ is the unit disk centered at x. Lemma 1 proves that all disks D₀, D₁,…, D_κ are pairwise interior‑disjoint. The proof uses the previously derived distance bounds: if two disks are centered at points within distance 3 of the origin, the inequality d(s_i, s_j) ≥ 2 ensures they do not overlap; analogous arguments cover the mixed cases where one center lies on the radius‑3 circle and the other lies inside it.
Since each disk has radius 1, the collection of κ + 1 disjoint unit disks must fit inside a larger circle of radius 4 (the disk centered at the origin with radius 4 contains all centers). A classical packing result by Fodor (2005) states that the smallest radius R that can accommodate 12 unit disks satisfies R > 4.029. Consequently, at most 11 unit disks can be packed inside a radius‑4 circle, implying κ + 1 ≤ 11 and therefore κ ≤ 10.
Thus every edge of the minimal cycle m belongs to 10‑GG(S), establishing that 10‑GG(S) is Hamiltonian for any point set S.
The paper also addresses lower bounds. A simple construction shows that 1‑GG may fail to be Hamiltonian, establishing the lower bound k ≥ 2. Moreover, the authors analyze the limitations of their “minimal‑cycle” method. By extending the system of inequalities to include the points t_i and exploring the feasible region of the resulting quadratic constraints, they argue that the method cannot guarantee Hamiltonicity for k < 6. Indeed, they exhibit a configuration where a minimal Hamiltonian cycle contains an edge not present in 5‑GG, and cite an unpublished example where even 7‑GG fails, suggesting that the best possible result obtainable by this technique is likely 8‑GG.
In the concluding section the authors discuss the possibility of solving the quadratic system with a more powerful optimizer to tighten the bound further, but note that the non‑convex nature of some constraints makes this challenging.
Overall, the paper makes a significant contribution by lowering the known sufficient k from 15 to 10, providing a clean geometric proof based on disk packing, and clarifying both the potential and the limitations of the current approach for future improvements.
Comments & Academic Discussion
Loading comments...
Leave a Comment