Winning strategies in congested traffic
One-directional traffic on two-lanes is modeled in the framework of a spring-block type model. A fraction $q$ of the cars are allowed to change lanes, following simple dynamical rules, while the other cars keep their initial lane. The advance of cars, starting from equivalent positions and following the two driving strategies is studied and compared. As a function of the parameter $q$ the winning probability and the average gain in the advancement for the lane-changing strategy is computed. An interesting phase-transition like behavior is revealed and conclusions are drawn regarding the conditions when the lane changing strategy is the better option for the drivers.
💡 Research Summary
The paper investigates how two elementary driving strategies perform in a congested, one‑directional two‑lane traffic flow. The authors adopt a spring‑block model, a physics‑inspired framework in which each vehicle is represented by a block of mass m attached to its predecessor by a spring of stiffness k. The spring force is proportional to the deviation of the inter‑vehicle gap from a preferred distance d₀, thereby generating realistic acceleration and deceleration when a car approaches or falls behind the vehicle ahead.
Two populations of cars are defined. A fraction q of the total fleet is allowed to change lanes (the “Lane‑Changing”, LC, group) while the remaining cars keep the lane they were initially assigned to (the “Lane‑Keeping”, LK, group). The LC cars follow three simple dynamical rules: (i) if the gap to the car in front on the current lane falls below a threshold d_c, the driver considers a lane change; (ii) a lane change is permitted only if the adjacent lane offers a gap larger than d_c at the same longitudinal position; (iii) the change is executed with a probability p (typically set to 1). After a successful change the spring connections are rewired to the new neighbours. LK cars never change lanes.
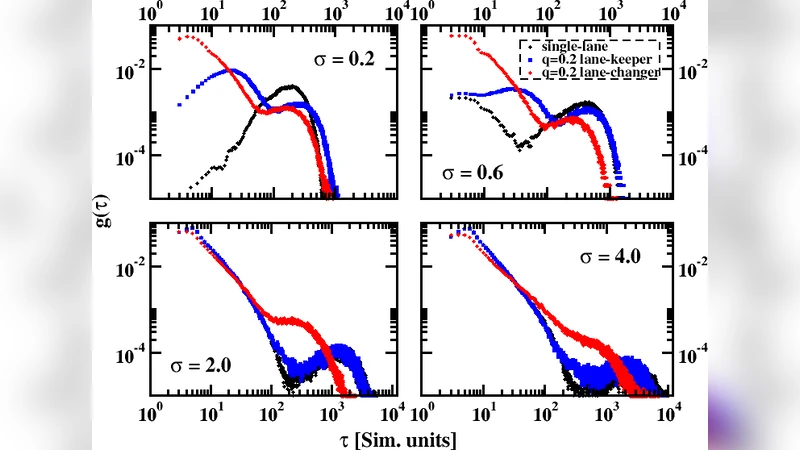
The system is initialized with the same average density ρ (vehicles per unit length) and the same spatial distribution for both groups. Simulations are run for a fixed duration T (10⁴ integration steps in the study). At the end of each run the average displacement Δx̄ of each group is measured. The “winning probability” P_w(q) is defined as the fraction of independent runs in which the LC group achieves a larger Δx̄ than the LK group. The average gain G(q) = ⟨Δx̄_LC – Δx̄_LK⟩ quantifies the net advantage of the lane‑changing strategy. Additional observables such as speed distributions, cluster (jam) sizes, and average waiting times are recorded to elucidate the microscopic mechanisms behind the macroscopic results.
The numerical results reveal a non‑monotonic dependence on the lane‑changing fraction q. For very small q (q ≲ 0.2) the LC cars change lanes so rarely that the two strategies are statistically indistinguishable; P_w≈0.5 and G≈0. In the intermediate regime (0.3 ≲ q ≲ 0.5) a pronounced “phase‑transition‑like” behavior emerges. Here the LC cars frequently relocate to the less congested lane, thereby breaking up large jams and redistributing gaps. The winning probability jumps to 0.8–0.9 and the average gain reaches a positive maximum (≈ 0.15 L, where L is the system length). Visual inspection of the spatio‑temporal diagrams shows a flushing effect: clusters dissolve as cars hop between lanes, and the overall flow becomes smoother.
When q exceeds roughly 0.6, the advantage disappears. The abundance of lane‑changing cars creates new bottlenecks in the previously freer lane, and the system reverts to a state where the LC group lags behind the LK group (P_w < 0.5, G < 0). This reversal indicates that excessive lane changes generate “over‑competition” that degrades the collective motion. The crossover point q_c≈0.45 behaves like a critical parameter: small variations around it produce large changes in P_w and G, reminiscent of a second‑order phase transition.
The authors also explore the influence of overall traffic density ρ. At high densities (ρ ≥ 0.8 veh/L) the system is already near saturation; a modest lane‑changing fraction (q ≈ 0.3) suffices to unlock a substantial flow improvement. Conversely, at low densities (ρ ≤ 0.4) the benefit only appears for large q (≥ 0.6), because jams are rare and lane changes rarely provide a shortcut. This density dependence suggests that the optimal lane‑changing policy is context‑specific: in heavily congested urban corridors a modest allowance for lane changes may be enough, whereas on freer highways a higher proportion of lane‑changing vehicles (or more aggressive lane‑change algorithms) would be required to gain an advantage.
Methodologically, the spring‑block approach offers a compact yet physically grounded description of car‑following dynamics while still permitting the inclusion of strategic decisions (lane changes). However, the model abstracts away many real‑world factors: driver heterogeneity, risk aversion, perception limits, vehicle type differences, and road geometry (curves, grades, on‑ramps). The authors acknowledge these limitations and propose that future work should couple the spring‑block core with stochastic driver‑behavior models or integrate empirical traffic data to calibrate parameters.
In conclusion, the paper identifies a clear regime in which the lane‑changing strategy outperforms a lane‑keeping strategy, delineated by a critical lane‑changing fraction q_c that depends on traffic density. The discovery of a strategy‑transition phenomenon provides a fresh theoretical lens for traffic‑management policies, such as dynamic lane‑assignment, dedicated overtaking lanes, or cooperative lane‑change protocols for autonomous vehicles. By quantifying the conditions under which lane changes are beneficial, the study offers actionable insights for engineers and policymakers seeking to alleviate congestion without costly infrastructure expansions.