Effects of communication and utility-based decision making in a simple model of evacuation
We present a simple cellular automaton based model of decision making during evacuation. Evacuees have to choose between two different exit routes, resulting in a strategic decision making problem. Agents take their decisions based on utility functions, these can be revised as the evacuation proceeds, leading to complex interaction between individuals and to jamming transitions. The model also includes the possibility to communicate and exchange information with distant agents, information received may affect the decision of agents. We show that under a wider range of evacuation scenarios performance of the model system as a whole is optimal at an intermediate fraction of evacuees with access to communication.
💡 Research Summary
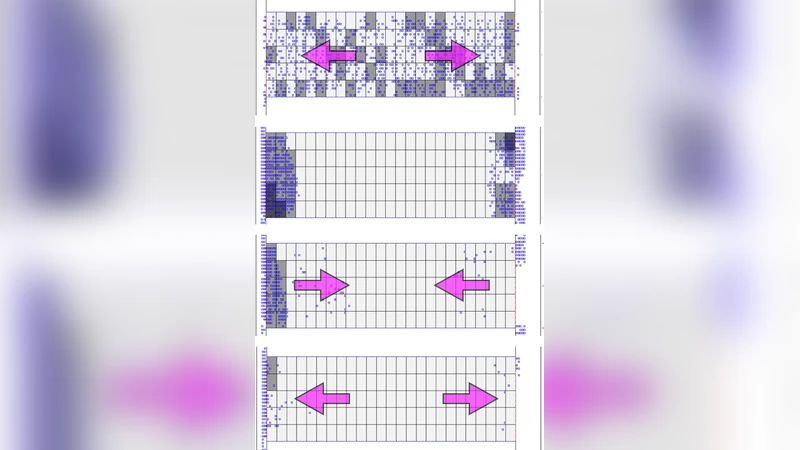
The paper introduces a minimalist cellular‑automaton (CA) framework to study how individuals make strategic exit choices during an evacuation when two egress routes are available. Each cell of a two‑dimensional lattice is either empty or occupied by an agent. At every discrete time step an agent evaluates a utility function for each exit, denoted U_i^k(t), where i indexes the agent, k∈{A,B} the exit, and t the current step. The utility combines a distance term (inverse of the Euclidean or Manhattan distance to the exit) and a congestion term (inverse of the current density of agents heading toward that exit). Formally, U_i^k(t)=α·(1/d_i^k)+β·(1/ρ_k(t)), with α and β weighting distance versus crowding. Agents select the exit with the larger utility, but utilities are not static; they evolve as other agents change routes, creating a feedback loop that can produce non‑linear collective dynamics and abrupt jamming transitions.
A novel element of the model is the inclusion of communication. A fraction p_c of the population is endowed with a “communication channel” that allows them to receive information from distant, similarly equipped agents. The received data consist of the other agents’ current exit choices, estimated speeds, and local crowding levels. This information is incorporated as a correction term δU_i added to the original utility: U_i^k(t)←U_i^k(t)+δU_i. The correction is weighted by a credibility factor γ and decays with a transmission delay τ, typically modeled as δU_i=γ·InfoUtility·e^{‑τ/τ_0}. Consequently, communicating agents possess a more global view of the evacuation state and can adjust their decisions accordingly.
Systematic simulations explore a broad parameter space: varying p_c from 0 % to 100 %, altering the distance‑to‑crowding weight ratio α/β, and testing several delay values τ. The primary performance metric is the average evacuation time (time until the last agent exits). The results reveal a robust, non‑monotonic dependence on p_c. When p_c=0 % (no communication) agents rely solely on local distance information, leading to frequent over‑crowding of the nearer exit and long evacuation times. At the opposite extreme, p_c=100 % (full communication) agents receive abundant information, but the decision‑making process becomes overly sensitive to fluctuations; agents repeatedly switch exits, creating oscillations and a new form of congestion caused by “information overload.” Between these extremes, an intermediate communication level—typically around 30–50 % of agents—minimizes the total evacuation time. This intermediate optimum persists across a wide range of α/β values, though the exact p_c that yields the best performance shifts: higher β (greater emphasis on crowding) pushes the optimum toward larger p_c, whereas a dominant distance term (large α) reduces the benefit of communication.
The study also highlights the critical role of transmission delay τ. Longer delays diminish the usefulness of shared information, effectively lowering the optimal p_c. In the limit of very large τ, the system behaves similarly to the no‑communication case, confirming that timely information is essential for the observed performance gains. Moreover, the model captures a sharp phase‑transition‑like behavior: small changes in α, β, or p_c can trigger a sudden shift from a smoothly flowing evacuation to a jammed state where a large fraction of agents become immobilized near the bottleneck.
From a practical standpoint, the findings suggest that evacuation guidance systems should not aim for universal real‑time information dissemination. Instead, designating a modest proportion of occupants as “information relays” (e.g., staff, sensors, or mobile devices) can provide sufficient global awareness while avoiding the pitfalls of excessive data exchange. Implementing low‑latency sensing (CCTV, Wi‑Fi tracking, or wearable devices) to keep τ small further enhances the benefit of communication. The model also underscores the importance of balancing distance cues (signage pointing to the nearest exit) with crowd‑density cues (dynamic displays indicating which exit is less congested). By calibrating these cues—effectively tuning α and β—facility managers can steer the collective behavior toward the optimal intermediate communication regime identified in the simulations.
In summary, the paper delivers a concise yet powerful computational experiment that links individual utility‑based decision making, limited-range communication, and emergent crowd dynamics. It demonstrates that a moderate fraction of communicating agents yields the best overall evacuation performance, and it provides quantitative guidance for designing real‑world evacuation information systems that exploit this principle.
Comments & Academic Discussion
Loading comments...
Leave a Comment