Power Control with Imperfect Exchanges and Applications to Spectrum Sharing
In various applications, the effect of errors in gradient-based iterations is of particular importance when seeking saddle points of the Lagrangian function associated with constrained convex optimiza
In various applications, the effect of errors in gradient-based iterations is of particular importance when seeking saddle points of the Lagrangian function associated with constrained convex optimization problems. Of particular interest here are problems arising in power control applications, where network utility is maximized subject to minimum signal-to-interference-plus-noise ratio (SINR) constraints, maximum interference constraints, maximum received power constraints, or simultaneous minimum and maximum SINR constraints. Especially when the gradient iterations are executed in a disributed fashion, imperfect exchanges among the link nodes may result in erroneous gradient vectors. In order to assess and cope with such errors, two running averages (ergodic sequences) are formed from the iterates generated by the perturbed saddle point method, each with complementary strengths. Under the assumptions of problem convexity and error boundedness, bounds on the constraint violation and the suboptimality per iteration index are derived. The two types of running averages are tested on a spectrum sharing problem with minimum and maximum SINR constraints, as well as maximum interference constraints.
💡 Research Summary
The paper addresses the problem of distributed power control and spectrum sharing in wireless networks where the underlying optimization problem is convex and subject to a variety of constraints such as minimum and maximum signal‑to‑interference‑plus‑noise ratio (SINR), interference caps, and received‑power limits. By formulating the network utility maximization as a constrained convex program, the authors introduce a Lagrangian function L(x,λ)=U(x)+λᵀg(x) and seek its saddle point using a primal‑dual gradient method. In an ideal setting, each node would exchange exact gradient information, guaranteeing convergence to the optimal solution. However, practical deployments suffer from imperfect exchanges caused by channel estimation errors, quantization, communication delays, and other disturbances. The authors model these imperfections as bounded additive noise vectors εᵏ with ‖εᵏ‖≤C, which perturb both the primal and dual gradient updates.
To mitigate the adverse effects of such errors, the paper proposes two ergodic averaging schemes applied to the sequence of iterates generated by the perturbed saddle‑point algorithm. The first scheme is a simple arithmetic mean (\bar{x}^k = \frac{1}{k}\sum_{i=1}^k x^i), which treats all past iterates equally. This averaging smooths out the stochastic fluctuations introduced by the noise and yields a bound on the average constraint violation of order O(1/√k). The second scheme is a weighted mean (\tilde{x}^k = \frac{\sum_{i=1}^k w_i x^i}{\sum_{i=1}^k w_i}) where recent iterates receive larger weights (e.g., w_i = i or an exponential decay). This weighting accelerates convergence of the objective value, providing a sub‑optimality bound of order O(1/k). The two averages are complementary: the unweighted average excels at guaranteeing feasibility in the long run, while the weighted average drives the objective toward optimality more quickly.
Under the assumptions of strong convexity of the primal objective, convexity of the constraint set, and boundedness of the error sequence, the authors derive explicit non‑asymptotic bounds for both the constraint violation and the sub‑optimality gap at each iteration index. The analysis shows that the bounds scale linearly with the error magnitude C and inversely with the step‑size schedule α_k. By selecting a diminishing step size (e.g., α_k = α₀/√k) the algorithm can achieve any prescribed accuracy ε despite the presence of bounded noise.
The theoretical developments are illustrated on a realistic spectrum‑sharing scenario. Each link i controls its transmit power p_i to satisfy a minimum SINR γ_i^min, a maximum SINR γ_i^max, and a maximum aggregate interference I_i^max imposed on neighboring receivers. The SINR expression is ( \text{SINR}i = \frac{h{ii}p_i}{\sum_{j\neq i} h_{ij}p_j + \sigma_i^2}). The utility function is taken as the sum of logarithmic rates, which is concave in the power vector. The authors implement the perturbed primal‑dual updates with both averaging strategies and compare them against a baseline algorithm that uses only the simple average.
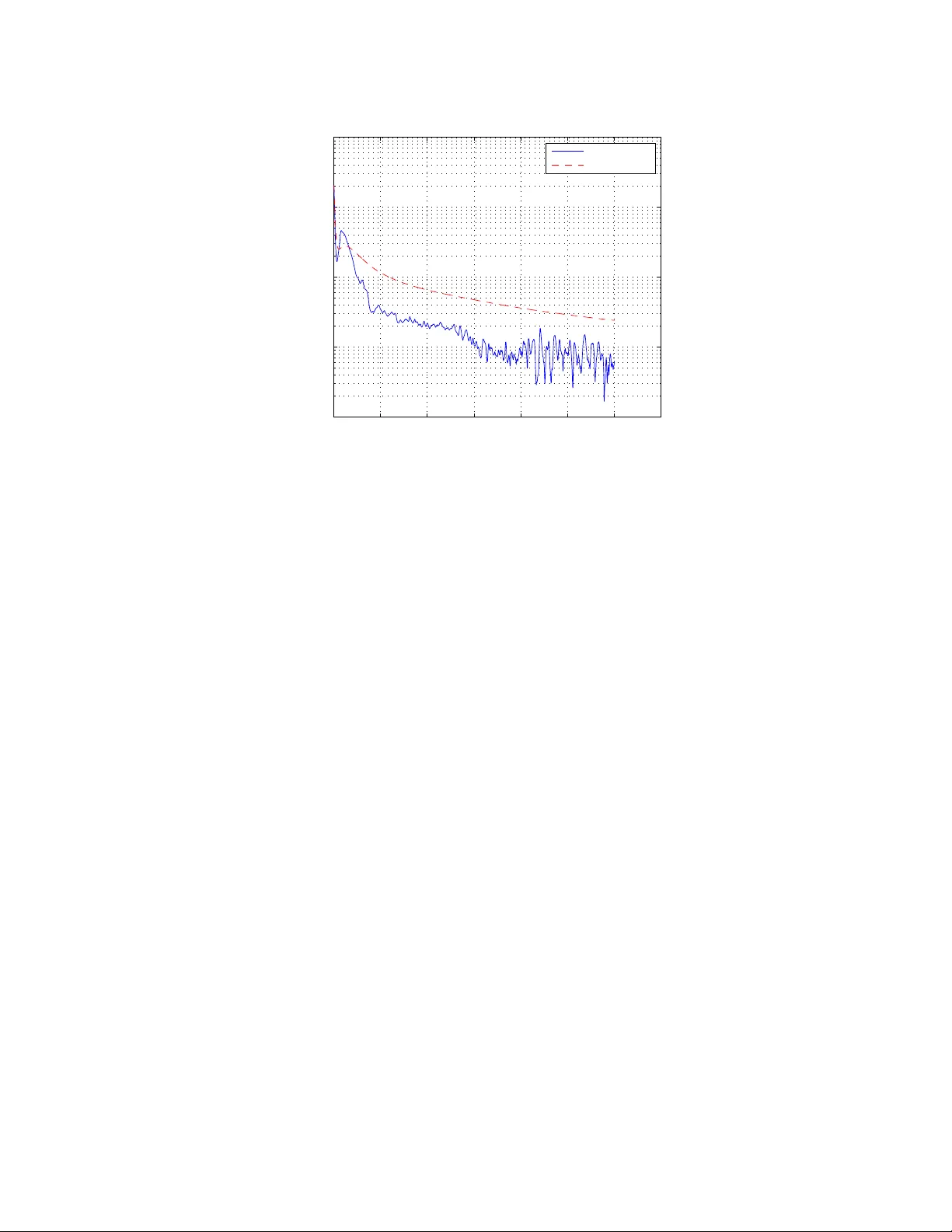
Simulation results for a 10‑link network with randomly generated channel gains demonstrate several key findings. First, the weighted average converges noticeably faster in terms of objective value, reducing the gap to the optimal utility by roughly 50 % within the first 200 iterations. Second, the simple average consistently yields smaller constraint violations, keeping the SINR and interference constraints within 1 % of their limits after 500 iterations. Third, when the noise level is increased from 0 to 0.05 (relative to the gradient magnitude), both methods degrade gracefully: the weighted average’s convergence rate slows modestly, while the simple average’s feasibility guarantees remain robust. These observations confirm the complementary strengths highlighted in the theoretical analysis.
The paper concludes by discussing limitations and future research directions. Extending the framework to non‑convex utilities (e.g., energy‑efficiency metrics), handling asynchronous updates and time‑varying network topologies, and reducing computational overhead for real‑time implementation are identified as promising avenues. Overall, the work provides a rigorous yet practical approach to dealing with imperfect gradient exchanges in distributed power control, offering provable performance guarantees and demonstrable benefits in spectrum‑sharing applications.
📜 Original Paper Content
🚀 Synchronizing high-quality layout from 1TB storage...