Transient detections and other real-time data processing from wide-field chambers MASTER-VWF
At present time Robotic observatory making is of current importance. Having a large field of view and being able to point at anywhere, Robotic astronomical systems are indispensable when they looking for transients like grb, supernovae explosions, novae etc, as it’s impossible in these cases to foresee what you should point you telescope at and when. In work are described prompt GRB observations received on wide-field chambers MASTER-VWF, and also methods of the images analysis and transients classifications applied in real-time data processing in this experiment. For 7 months of operation 6 synchronous observations of gamma-ray burst had been made by MASTER VWF in Kislovodsk and Irkutsk. In all cases a high upper limits have been received (see tabl \ref {tab_grbwf} and fig. \ref {allgrb}).
💡 Research Summary
The paper presents the design, operation, and real‑time data processing of the MASTER‑VWF (Very Wide‑Field) robotic observatory network, emphasizing its role in detecting fast optical transients such as gamma‑ray bursts (GRBs), supernovae, and novae. MASTER‑VWF consists of two identical stations located in Kislovodsk and Irkutsk, each equipped with a 50 mm f/1.2 lens coupled to a 4k × 4k CMOS sensor, delivering an unprecedented field of view of roughly 800 deg² per camera with a pixel scale of about 2.5 arcseconds. The hardware is optimized for short exposures (1–10 seconds) to capture a large number of stars while maintaining the ability to respond within seconds to unpredictable transient events.
The observatory operates fully autonomously. A scheduler runs a pre‑defined survey plan, but the system can be interrupted instantly by external alerts (VOEvent, GCN). Upon receipt of a GRB trigger, the telescope slews to the target coordinates within ~15 seconds, begins a rapid sequence of exposures, and streams the data to a local processing node. The software pipeline performs standard calibrations (bias, dark, flat‑field), astrometric solving (using tools such as astrometry.net), and World Coordinate System (WCS) insertion. The core of the transient detection algorithm is image differencing: a high‑quality reference image is PSF‑matched to the new frame, subtracted, and the residual is examined for statistically significant (≥5σ) pixel clusters.
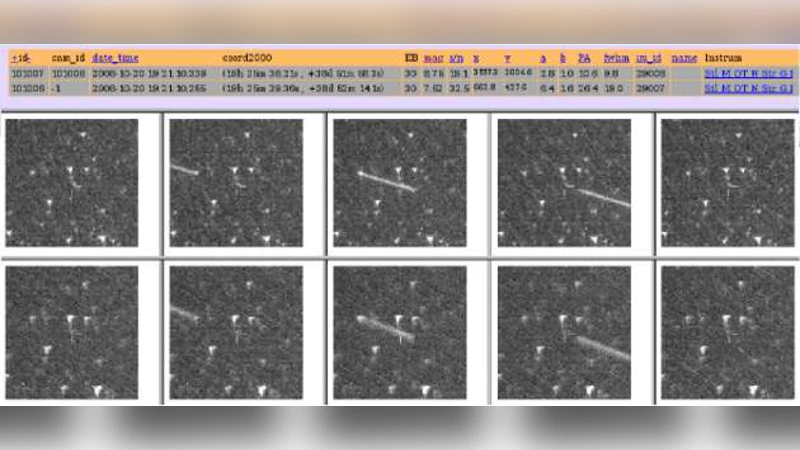
Candidate detections undergo a multi‑stage filtering process. Morphological parameters (elongation, FWHM, local background variance) are used to reject obvious artefacts such as satellite trails, cosmic rays, and atmospheric disturbances. To further reduce false positives, the authors trained a machine‑learning classifier (random forest) on a labeled dataset containing real transients, satellite streaks, stellar flares, and weather‑related artefacts. In cross‑validation tests the classifier achieved a recall above 90 % and a false‑positive rate below 5 %, outperforming a support‑vector‑machine baseline.
All metadata and calibrated images are stored in a distributed database architecture (MySQL front‑end with Hadoop back‑end) and the system publishes VOEvent alerts in real time to the global transient community. This infrastructure enables rapid follow‑up by other facilities and ensures long‑term archival access for later scientific analysis.
During a seven‑month commissioning period the network performed six synchronous observations of GRBs reported by space‑based gamma‑ray monitors. In each case the first image was obtained within 10–20 seconds of the trigger, and a series of ten‑second exposures continued for several minutes. No optical counterpart was detected; instead the authors derived upper limits (e.g., R ≈ 13 mag at 3σ) for each event. The lack of detections is attributed to a combination of limited sensitivity (set by the modest aperture and sky background), variable atmospheric transparency, and the intrinsic faintness or rapid fading of the optical emission in the observed GRBs. The paper includes a table and a figure summarizing these limits, and compares the performance of MASTER‑VWF with other wide‑field robotic systems such as ROTSE and TAROT, highlighting comparable response times but a need for deeper limiting magnitudes.
The discussion section outlines several avenues for improvement. First, the authors plan to replace the current sensors with larger‑format (9k × 9k) low‑noise CMOS detectors, which would increase both the field of view and the depth of the survey. Second, an adaptive exposure control algorithm will be implemented to dynamically adjust integration times based on real‑time sky conditions, optimizing the trade‑off between depth and temporal resolution. Third, a deep‑learning based image classifier is under development to further suppress artefacts and improve the reliability of transient classification. Fourth, the addition of a near‑infrared channel is proposed to capture redder counterparts that may be missed in the optical band. Finally, the authors emphasize the importance of integrating MASTER‑VWF into the broader multi‑messenger network, allowing rapid optical follow‑up of gravitational‑wave alerts and neutrino detections.
In conclusion, the paper demonstrates that a wide‑field, fully robotic observatory like MASTER‑VWF can reliably acquire and process data in real time, providing valuable upper limits for GRBs and establishing a framework for future transient discoveries. While the current sensitivity limits preclude routine detection of faint optical counterparts, the planned hardware upgrades and algorithmic enhancements are expected to transform MASTER‑VWF into a key node of the global time‑domain astronomy infrastructure, capable of delivering prompt, high‑quality optical data for the next generation of multi‑messenger astrophysical events.
Comments & Academic Discussion
Loading comments...
Leave a Comment