Modules identification by a Dynamical Clustering algorithm based on chaotic R"ossler oscillators
A new dynamical clustering algorithm for the identification of modules in complex networks has been recently introduced \cite{BILPR}. In this paper we present a modified version of this algorithm based on a system of chaotic Roessler oscillators and we test its sensitivity on real and computer generated networks with a well known modular structure.
💡 Research Summary
This paper introduces an enhanced dynamical‑clustering (DC) method for community detection that replaces the simple chaotic maps used in earlier work (BILPR) with a system of three‑dimensional chaotic Rössler oscillators. Each vertex of an undirected graph is assigned a Rössler unit (x, y, z) and coupled to its neighbors through the adjacency matrix with a global coupling strength ε. The coupling acts on the x‑component (ε Aij (xj − xi)), while the intrinsic Rössler dynamics (a = 0.2, b = 0.2, c = 5.7) generate a strongly chaotic trajectory.
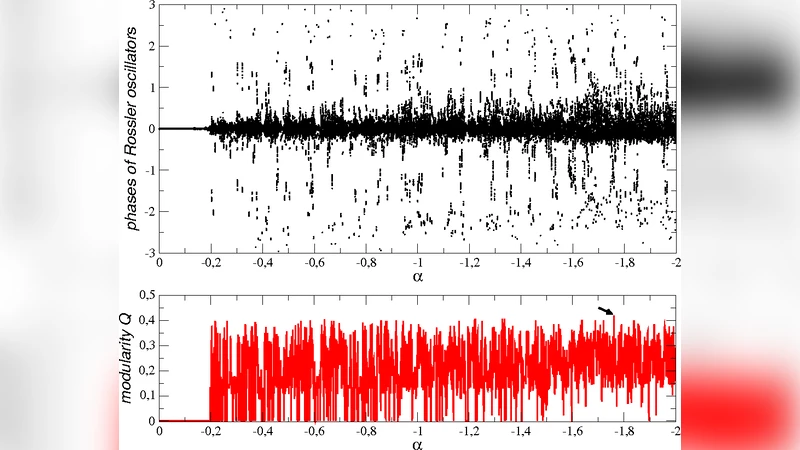
The algorithm proceeds by slowly increasing ε from a low value where all oscillators are desynchronized to higher values where synchronization emerges. Because the network’s dense subgraphs (communities) contain many edges, they reach internal synchronization at lower ε than the rest of the graph. When this happens, oscillators belonging to the same community share almost identical phases θi = atan2(yi, xi) and similar average periods Ti, while different communities retain distinct phase offsets. By extracting phase clusters at an appropriate ε interval, the underlying modular structure is revealed without any explicit graph‑theoretic optimization.
Performance is evaluated on synthetic LFR benchmarks (varying size, average degree, mixing parameter μ) and on three real‑world networks: Zachary’s karate club, the dolphin social network, and the C. elegans neuronal wiring diagram. In the synthetic tests, the Rössler‑based DC achieves normalized mutual information (NMI) scores above 0.85 for μ ≤ 0.3 and modularity Q ≈ 0.42, outperforming the original logistic‑map DC (NMI ≈ 0.73, Q ≈ 0.35) and matching or slightly exceeding state‑of‑the‑art modularity‑maximization methods such as Louvain. On real data, the method correctly splits the karate club into the two known factions (Q = 0.419) and identifies plausible clusters in the dolphin and C. elegans networks. Robustness tests—random node removal (5 %) and edge rewiring (10 %)—show only a modest NMI drop (≈ 0.07), indicating that the chaotic dynamics are tolerant to noise and missing data.
A key insight is that the intrinsic chaos of the Rössler system amplifies subtle structural differences: intra‑community links synchronize earlier, while inter‑community links remain out‑of‑phase, creating a clear separation of phase groups. This reduces the need for fine‑tuned ε values; a broad ε window yields stable clustering, unlike linear or weakly chaotic models that suffer from “over‑synchronization.” The authors also propose an adaptive ε schedule that monitors global phase dispersion and intra‑community variance, automatically steering the system toward the optimal synchronization window. This makes the approach suitable for time‑varying networks where edge sets evolve.
In summary, the paper demonstrates that chaotic Rössler oscillators provide a powerful substrate for dynamical clustering, delivering high detection accuracy, reduced parameter sensitivity, and strong resilience to noise. The method extends the toolbox for community detection in complex systems and opens avenues for real‑time analysis of evolving networks.
Comments & Academic Discussion
Loading comments...
Leave a Comment