Spherical coverage verification
We consider the problem of covering hypersphere by a set of spherical hypercaps. This sort of problem has numerous practical applications such as error correcting codes and reverse k-nearest neighbor problem. Using the reduction of non degenerated concave quadratic programming (QP) problem, we demonstrate that spherical coverage verification is NP hard. We propose a recursive algorithm based on reducing the problem to several lower dimension subproblems. We test the performance of the proposed algorithm on a number of generated constellations. We demonstrate that the proposed algorithm, in spite of its exponential worst-case complexity, is applicable in practice. In contrast, our results indicate that spherical coverage verification using QP solvers that utilize heuristics, due to numerical instability, may produce false positives.
💡 Research Summary
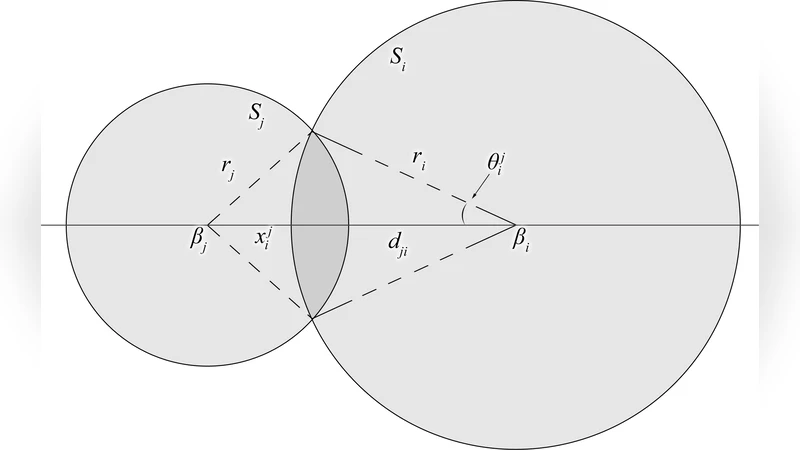
The paper addresses the decision problem of whether a set of spherical caps (hyper‑caps) completely covers a unit hypersphere in arbitrary dimension d, a problem the authors denote as Spherical Coverage Verification (SphCovVer). After formally defining hyper‑caps as cones C_i = {x ∈ ℝ^d | (t_i·x) ≥ θ_i} with unit direction vectors t_i and thresholds θ_i∈(−1,1), the authors show that the coverage question is equivalent to the feasibility of a nonlinear system (1): ‖x‖² = 1 together with the linear inequalities t_i·x < θ_i for all i.
The key theoretical contribution is a proof that SphCovVer is NP‑hard. The authors first reformulate the feasibility of (1) as a pair of convex quadratic programming (QP) problems (2) that minimize and maximize the quadratic objective f(x)=‖x‖² over the polyhedron defined by the linear constraints (with ≤ instead of <). Lemma 1 establishes that (1) has a solution if and only if the minimum m of f over the closed polyhedron satisfies m < 1, the maximum M satisfies M > 1, and the polyhedron is non‑degenerate (i.e., not confined to a hyperplane).
To prove NP‑hardness, they introduce a concave non‑degenerate QP decision problem (ConNDQPd) that asks whether there exists x with x·x > c subject to a set of linear inequalities. They present Algorithm 1 (QP‑SphCovVer) that reduces any instance of ConNDQPd to an instance of SphCovVer in polynomial time by normalizing the constraints, solving the minimization QP, discarding constraints with θ_i > 1, and finally invoking the coverage test. Correctness follows from Lemma 1.
Next, they show that ConNDQPd itself is NP‑complete by a reduction from the classic k‑Clique problem. For a graph G(V,E) with |V|=n, they construct a ConNDQPd instance where each vertex corresponds to a variable x_i bounded in
Comments & Academic Discussion
Loading comments...
Leave a Comment