Fuzzy Consensus and Synchronization: Theory and Application to Critical Infrastructure Protection Problems
In this paper the Distributed Consensus and Synchronization problems with fuzzy-valued initial conditions are introduced, in order to obtain a shared estimation of the state of a system based on partial and distributed observations, in the case where such a state is affected by ambiguity and/or vagueness. The Discrete-Time Fuzzy Systems (DFS) are introduced as an extension of scalar fuzzy difference equations and some conditions for their stability and representation are provided. The proposed framework is then applied in the field of Critical Infrastructures; the consensus framework is used to represent a scenario where human operators, each able to observe directly the state of a given infrastructure (or of a given area considering vast and geographically dispersed infrastructures), reach an agreement on the overall situation, whose severity is expressed in a linguistic, fuzzy way; conversely synchronization is used to provide a distributed interdependency estimation system, where an array of interdependency models is synchronized via partial observation.
💡 Research Summary
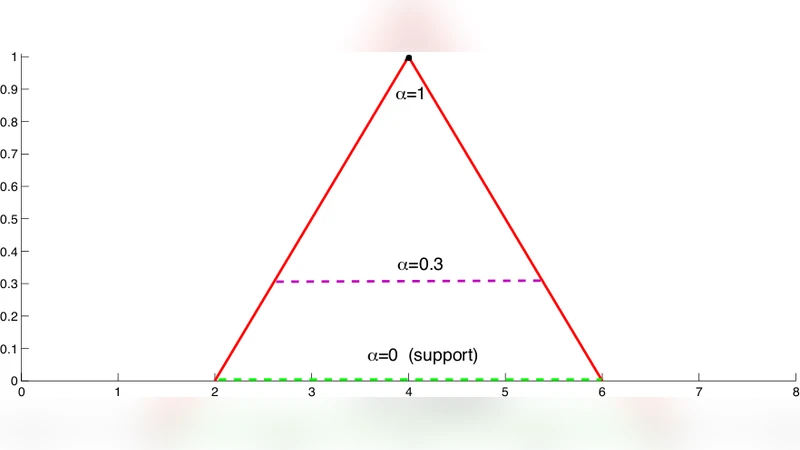
The paper introduces a novel framework for distributed consensus and synchronization when the agents’ initial states are fuzzy-valued, i.e., described by fuzzy numbers that capture ambiguity and vagueness. The authors first formalize fuzzy sets and fuzzy numbers, focusing on triangular fuzzy numbers (TFNs) and the α‑level representation, and equip the space of fuzzy vectors (E^N) with a Hausdorff‑based metric (d_{E^N}). This metric enables rigorous definitions of convergence and stability for fuzzy dynamical systems.
Discrete‑time fuzzy systems (DFS) are defined as (x(k+1)=F(x(k),k)) with fuzzy state vectors (x(k)\in E^N). To analyze stability, the paper establishes a comparison principle between a DFS and an associated crisp (non‑fuzzy) system (z(k+1)=G(z(k),k)). The key results (Theorem 3.2 and Corollary 3.3) show that if the crisp system is monotone non‑decreasing and its solution is stable, then, under a suitable “defuzzification” mapping (V:E^N\to\mathbb{R}^N) that respects the ordering, the fuzzy system inherits the same stability properties. In other words, stability of a fuzzy system can be inferred from the stability of a corresponding crisp system obtained by defuzzifying the fuzzy state.
The consensus problem is then addressed on a weighted directed graph (G(V,E,\Gamma)) with Laplacian matrix (L). Each node holds a fuzzy estimate of a global quantity and updates it by exchanging information with its neighbors. By applying the classic consensus update to each α‑level interval, the authors prove that, provided the graph is strongly connected (or undirected and connected) and the Laplacian has a simple zero eigenvalue, all fuzzy estimates converge to a common fuzzy value (\hat{x}^*). The convergence is level‑wise, preserving the shape of the fuzzy numbers throughout the process.
For synchronization, the paper considers an array of identical agents whose dynamics are described by the same linear (or linearized) matrix (F). Each agent receives only partial observations from its neighbors. By constructing a feedback law based on the graph Laplacian and applying it to the upper and lower bounds of each α‑level, the authors demonstrate that the agents’ fuzzy trajectories synchronize to a common fuzzy trajectory. The analysis again reduces to checking the stability of a stacked crisp system composed of two replicas (upper and lower bounds), which follows from the monotonicity properties of (F).
The theoretical developments are illustrated with two application scenarios in Critical Infrastructure Protection (CIP). In the first scenario, multiple human operators monitor geographically dispersed infrastructure components (e.g., power substations, water networks) and express their assessments of the current situation using linguistic fuzzy terms such as “high risk” or “moderate impact”. The distributed fuzzy consensus algorithm aggregates these subjective assessments into a single, shared fuzzy estimate of the overall system state, enabling coordinated response without requiring precise numerical data. In the second scenario, a set of interdependency models (e.g., power‑communication, transportation‑energy) are coupled through partial observations of each other’s outputs. By employing the fuzzy synchronization scheme, the models converge to a consistent interdependency forecast, even though each model only receives incomplete information and each forecast is expressed as a fuzzy number reflecting modeling uncertainty. Simulations show that the fuzzy consensus and synchronization converge at rates comparable to their crisp counterparts, and that the resulting fuzzy estimates faithfully capture the underlying uncertainty.
Overall, the paper makes three major contributions: (1) it extends discrete‑time consensus and synchronization theory to the fuzzy domain by leveraging α‑level decomposition and a Hausdorff‑based metric; (2) it provides a rigorous stability comparison theorem that links fuzzy system stability to that of an associated crisp system; and (3) it demonstrates the practical relevance of the theory in CIP, where human judgment and model uncertainty are intrinsic. The work opens avenues for further research on fuzzy distributed control, robustness to time‑varying network topologies, and integration with probabilistic uncertainty models.
Comments & Academic Discussion
Loading comments...
Leave a Comment