On Intrinsic Geometric Stability of Controller
This work explores the role of the intrinsic fluctuations in finite parameter controller configurations characterizing an ensemble of arbitrary irregular filter circuits. Our analysis illustrates that the parametric intrinsic geometric description exhibits a set of exact pair correction functions and global correlation volume with and without the variation of the mismatch factor. The present consideration shows that the canonical fluctuations can precisely be depicted without any approximation. The intrinsic geometric notion offers a clear picture of the fluctuating controllers, which as the limit of the ensemble averaging reduce to the specified controller. For the constant mismatch factor controllers, the Gaussian fluctuations over equilibrium basis accomplish a well-defined, non-degenerate, flat regular intrinsic Riemannian surface. An explicit computation further demonstrates that the underlying power correlations involve ordinary summations, even if we consider the variable mismatch factor controllers. Our intrinsic geometric framework describes a definite character to the canonical power fluctuations of the controllers and constitutes a stable design strategy for the parameters.
💡 Research Summary
The paper proposes a novel application of intrinsic (thermodynamic) geometry to the stability analysis of controller designs, focusing on a class of low‑pass filter controllers parameterized by three quantities: two circuit parameters a and b, and a mismatch factor f that captures component tolerances or modeling errors. The authors treat the controller’s transfer function G_con(a,b,f) as a smooth scalar function on a parameter manifold and construct a Riemannian metric by taking the Hessian (second derivatives) of G_con with respect to the parameters. This metric encodes “self‑correlations” (analogous to heat capacities) on the diagonal (g_aa, g_bb) and cross‑correlations (g_ab) off‑diagonal.
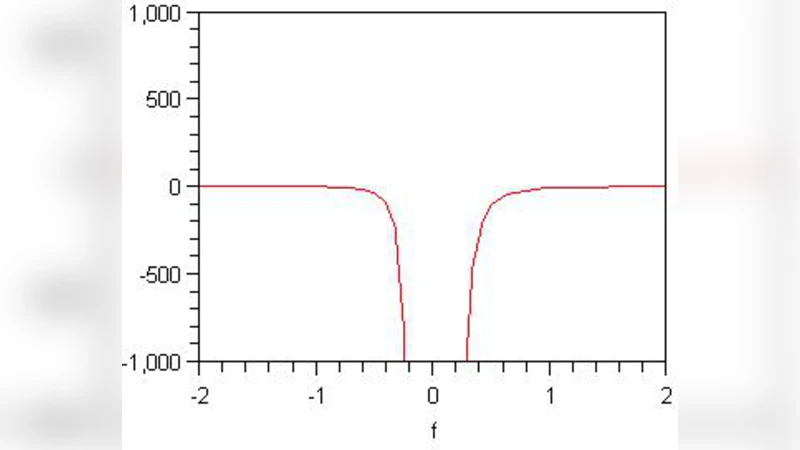
For the case of a constant mismatch factor (f fixed), explicit analytic expressions for the metric components are derived (Eq. 2). The determinant of the metric, Det(g), serves as a local stability criterion: positivity of Det(g) indicates that the Gaussian fluctuation matrix is positive‑definite and the system is locally stable. When the parameters are set to zero (a = b = 0), corresponding to a linear controller, the determinant simplifies to a rational function of f and the complex signal S. The authors show that Det(g) changes sign as f approaches zero, implying a loss of stability; this is illustrated in Figure 3, where the determinant becomes negative for |f| ≤ 0, a region the authors describe as a “throat” in the stability landscape.
When the mismatch factor is allowed to fluctuate (f becomes a dynamical parameter), additional metric components involving f appear (g_af, g_bf, g_ff). The parameter space thus becomes three‑dimensional, and the associated Riemann curvature tensor is generally non‑zero. The authors compute the Christoffel symbols (Eq. 6) and demonstrate that, unlike the constant‑f case where the scalar curvature vanishes (indicating a flat, non‑interacting statistical manifold), the variable‑f case exhibits curvature, signifying intrinsic interactions among the parameters. This curvature provides a geometric measure of how sensitive the controller is to simultaneous variations in a, b, and f.
Key insights from the work include:
- Geometric Stability Criterion – The sign of Det(g) and the scalar curvature give a compact, coordinate‑independent way to assess whether a set of controller parameters will remain stable under small stochastic fluctuations.
- Flat Manifold for Fixed Mismatch – When f is fixed, the parameter manifold is globally flat (zero curvature), implying that fluctuations in a and b are statistically independent; this aligns with the intuition that a well‑tuned mismatch factor isolates the controller from component‑level noise.
- Interaction Emergence with Variable Mismatch – Allowing f to vary introduces coupling terms that can render the system unstable for certain ranges of f, as reflected by a sign change in Det(g) and non‑zero curvature. This highlights the importance of tightly controlling mismatch factors in practical hardware.
The paper’s strengths lie in its rigorous analytical treatment, the clear derivation of metric components, and the novel perspective of applying thermodynamic geometry to control theory. However, several limitations are evident: the analysis is confined to a single‑input, single‑output low‑pass filter topology; extensions to higher‑order, multi‑input‑multi‑output (MIMO) controllers are not addressed. The study lacks experimental validation or numerical simulations that would demonstrate the practical relevance of the curvature‑based criteria. Moreover, the physical interpretation of curvature in the context of classical control metrics (gain/phase margins, robustness indices) remains speculative.
In conclusion, the authors successfully demonstrate that intrinsic geometric methods can quantify the stability of controller parameter ensembles, offering a complementary tool to traditional robustness analysis. Future work should aim to integrate these geometric indicators with standard control design frameworks, test them on real hardware, and explore their applicability to broader classes of controllers, including nonlinear and adaptive schemes.
Comments & Academic Discussion
Loading comments...
Leave a Comment