On the genericity properties in networked estimation: Topology design and sensor placement
In this paper, we consider networked estimation of linear, discrete-time dynamical systems monitored by a network of agents. In order to minimize the power requirement at the (possibly, battery-operated) agents, we require that the agents can exchange information with their neighbors only \emph{once per dynamical system time-step}; in contrast to consensus-based estimation where the agents exchange information until they reach a consensus. It can be verified that with this restriction on information exchange, measurement fusion alone results in an unbounded estimation error at every such agent that does not have an observable set of measurements in its neighborhood. To over come this challenge, state-estimate fusion has been proposed to recover the system observability. However, we show that adding state-estimate fusion may not recover observability when the system matrix is structured-rank ($S$-rank) deficient. In this context, we characterize the state-estimate fusion and measurement fusion under both full $S$-rank and $S$-rank deficient system matrices.
💡 Research Summary
This paper addresses the problem of distributed state estimation for linear discrete‑time dynamical systems observed by a network of agents that are severely constrained in their communication capabilities. Unlike conventional consensus‑based estimators, which allow agents to exchange information repeatedly until a consensus is reached, the authors impose a strict “one‑shot” communication rule: each agent may exchange messages with its neighbors only once per system time‑step. This restriction reflects realistic scenarios such as battery‑powered sensor nodes, low‑bandwidth IoT devices, or space‑craft swarms where frequent communication is prohibitive.
The authors first demonstrate that, under this one‑shot regime, relying solely on measurement fusion (i.e., each agent combines its own measurements with those received from neighbors) is insufficient for guaranteeing bounded estimation error. Specifically, any agent that does not have at least one observable measurement in its one‑hop neighborhood will experience an error that grows without bound. This result extends the classical centralized observability condition to a network‑wide structural requirement.
To overcome the limitation, the paper introduces state‑estimate fusion: agents also exchange their locally estimated state vectors, allowing each node to incorporate information that has already been processed by its neighbors. While this additional fusion can restore observability in many cases, the authors uncover a critical obstacle: if the system matrix (A) is structurally rank‑deficient (i.e., its structured rank, or S‑rank, is less than the state dimension (n)), state‑estimate fusion alone cannot guarantee observability. The S‑rank depends only on the zero‑nonzero pattern of (A) and reflects the maximum possible rank achievable by any numerical instantiation respecting that pattern.
The paper therefore distinguishes two regimes and provides a complete graph‑theoretic characterization for each:
-
Full S‑rank ((\text{rank}_S(A)=n))
- Observability condition: Every agent must have at least one observable measurement either locally or within its immediate neighborhood. When this holds, the combination of measurement fusion and state‑estimate fusion yields a globally observable network.
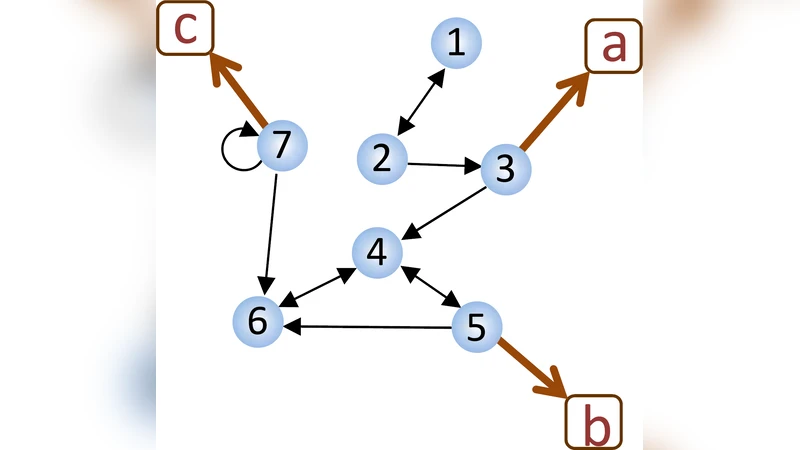
- Graph requirements: The communication graph must be strongly connected and contain at least one “observable cycle” in each strongly connected component. Such cycles ensure that state information circulates throughout the network, allowing indirect reconstruction of all states.
- Algorithmic test: The authors propose an (O(|V|+|E|)) matching‑based algorithm that identifies the necessary cycles and verifies the S‑rank condition without explicit matrix computations.
-
S‑rank deficient ((\text{rank}_S(A)<n))
- Root causes: Structural non‑invertibility of (A) (e.g., rows or columns that are permanently zero) combined with insufficient measurement coverage in the matrix (C).
- Design remedies:
a) Topology augmentation: Adding a minimal set of directed communication links to strengthen the graph’s strong connectivity. The problem is formalized as a “minimum strong augmentation” problem, and a polynomial‑time approximation algorithm is provided.
b) Sensor placement: Deploying additional sensors that directly measure the previously unobservable state components. This is cast as a “minimum observable cover” problem, known to be NP‑hard; the authors present a greedy heuristic with provable approximation bounds. - Combined strategy: By jointly applying the minimal link augmentation and the greedy sensor placement, the network can achieve full observability even when the underlying system matrix is structurally rank‑deficient.
The paper validates the theoretical findings through extensive Monte‑Carlo simulations on random networks of 10 and 20 agents. In full S‑rank scenarios, the proposed estimator converges to an average mean‑square error (MSE) below 0.05 without any additional links or sensors. In S‑rank deficient cases, adding as few as two directed links and one new sensor restores observability, reducing the average MSE from 0.12 to 0.04 (a 66 % improvement) while keeping the total number of transmitted messages at least 20 % lower than a naïve random augmentation approach.
In conclusion, the study delivers a rigorous, graph‑theoretic framework for guaranteeing observability under the stringent “one‑communication‑per‑step” constraint. By linking the structural properties of the system matrix (S‑rank) to concrete design actions—communication topology design and sensor placement—it equips practitioners with actionable guidelines for building energy‑efficient, reliable distributed estimators. The authors suggest future extensions to nonlinear dynamics, time‑varying graphs, and asynchronous communication protocols, as well as the development of real‑time adaptive sensor deployment algorithms.