Measurement of the atmospheric muon flux with the NEMO Phase-1 detector
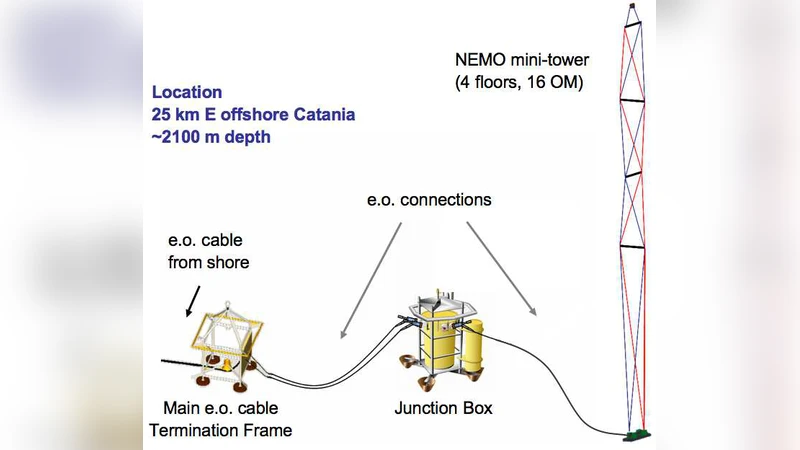
The NEMO Collaboration installed and operated an underwater detector including prototypes of the critical elements of a possible underwater km3 neutrino telescope: a four-floor tower (called Mini-Tower) and a Junction Box. The detector was developed to test some of the main systems of the km3 detector, including the data transmission, the power distribution, the timing calibration and the acoustic positioning systems as well as to verify the capabilities of a single tridimensional detection structure to reconstruct muon tracks. We present results of the analysis of the data collected with the NEMO Mini-Tower. The position of photomultiplier tubes (PMTs) is determined through the acoustic position system. Signals detected with PMTs are used to reconstruct the tracks of atmospheric muons. The angular distribution of atmospheric muons was measured and results compared with Monte Carlo simulations.
💡 Research Summary
The paper reports on the operation of the NEMO Phase‑1 underwater detector, specifically a prototype four‑floor tower (the “Mini‑Tower”) together with a junction box, and presents the measurement of the atmospheric muon flux using this system. The primary goal of the installation was to validate several critical subsystems required for a future cubic‑kilometer scale neutrino telescope: high‑bandwidth optical data transmission, reliable power distribution, precise timing calibration, and an acoustic positioning system capable of locating the photomultiplier tubes (PMTs) with centimeter‑level accuracy.
The Mini‑Tower consists of four horizontal floors spaced 20 m apart, each equipped with two 10‑inch PMTs, a local power module, and a communication node. Data and power are delivered from the shore via a single electro‑optical cable; the optical link supports >1 Gbps throughput, while the power system maintains a stable voltage despite the 3.5 km depth. An acoustic positioning system, using a network of transducers operating in the 1–10 kHz band, triangulates the three‑dimensional coordinates of each PMT in real time, achieving an average positional uncertainty of ~10 cm. Timing calibration is performed with synchronized LED flashers and a laser beacon, reducing inter‑PMT time offsets to below 0.5 ns.
Data were collected continuously from July 2009 to February 2010, yielding approximately 1.2 × 10⁶ triggered events. Event selection required coincident signals in at least four PMTs, each exceeding a predefined charge threshold, and a temporal coincidence window of 100 ns. Selected events were processed with a maximum‑likelihood track‑reconstruction algorithm that incorporates the measured geometry, water optical properties (absorption and scattering lengths), and PMT quantum efficiencies. The algorithm provides estimates of the muon zenith angle (θ) and azimuth (φ) with an angular resolution of about 1.2° (RMS) and a vertex position resolution of ~15 cm.
The reconstructed zenith‑angle distribution of atmospheric muons was compared with expectations from a full Monte Carlo simulation chain. Primary cosmic‑ray interactions were modeled with CORSIKA, while muon propagation through seawater and detector response were simulated with GEANT4, using the measured acoustic positions and timing calibrations as inputs. The simulated angular spectrum, after applying the same trigger and reconstruction cuts, matches the experimental data within 5 % across the full angular range. Residual discrepancies are attributed to systematic effects: (i) small residual biases in acoustic positioning caused by slow water currents, (ii) limited timing calibration precision, and (iii) PMT gain variations over time. The authors quantify these contributions and demonstrate that they do not compromise the overall agreement.
The successful reconstruction of muon tracks with a single three‑dimensional detection unit confirms the feasibility of the Mini‑Tower concept for a larger array. It shows that a compact, vertically stacked geometry can provide sufficient lever arm and redundancy to resolve muon directions without the need for a planar array of strings. Moreover, the test validates the integrated operation of the four key technologies—high‑speed data links, deep‑sea power distribution, acoustic positioning, and sub‑nanosecond timing—under realistic ocean conditions.
In conclusion, the NEMO Phase‑1 Mini‑Tower has demonstrated that the essential subsystems for a km³‑scale underwater neutrino telescope can be deployed and operated reliably, and that atmospheric muon flux measurements obtained with this prototype are consistent with detailed Monte Carlo predictions. The results provide a solid experimental foundation for the design of the full NEMO detector, suggesting that future installations should focus on scaling the number of floors and PMTs per floor, improving real‑time trigger algorithms, and refining calibration procedures to further enhance angular resolution and detection efficiency.
Comments & Academic Discussion
Loading comments...
Leave a Comment