The parameterized complexity of some geometric problems in unbounded dimension
We study the parameterized complexity of the following fundamental geometric problems with respect to the dimension $d$: i) Given $n$ points in $\Rd$, compute their minimum enclosing cylinder. ii) Given two $n$-point sets in $\Rd$, decide whether the…
Authors: Panos Giannopoulos, Christian Knauer, Gunter Rote
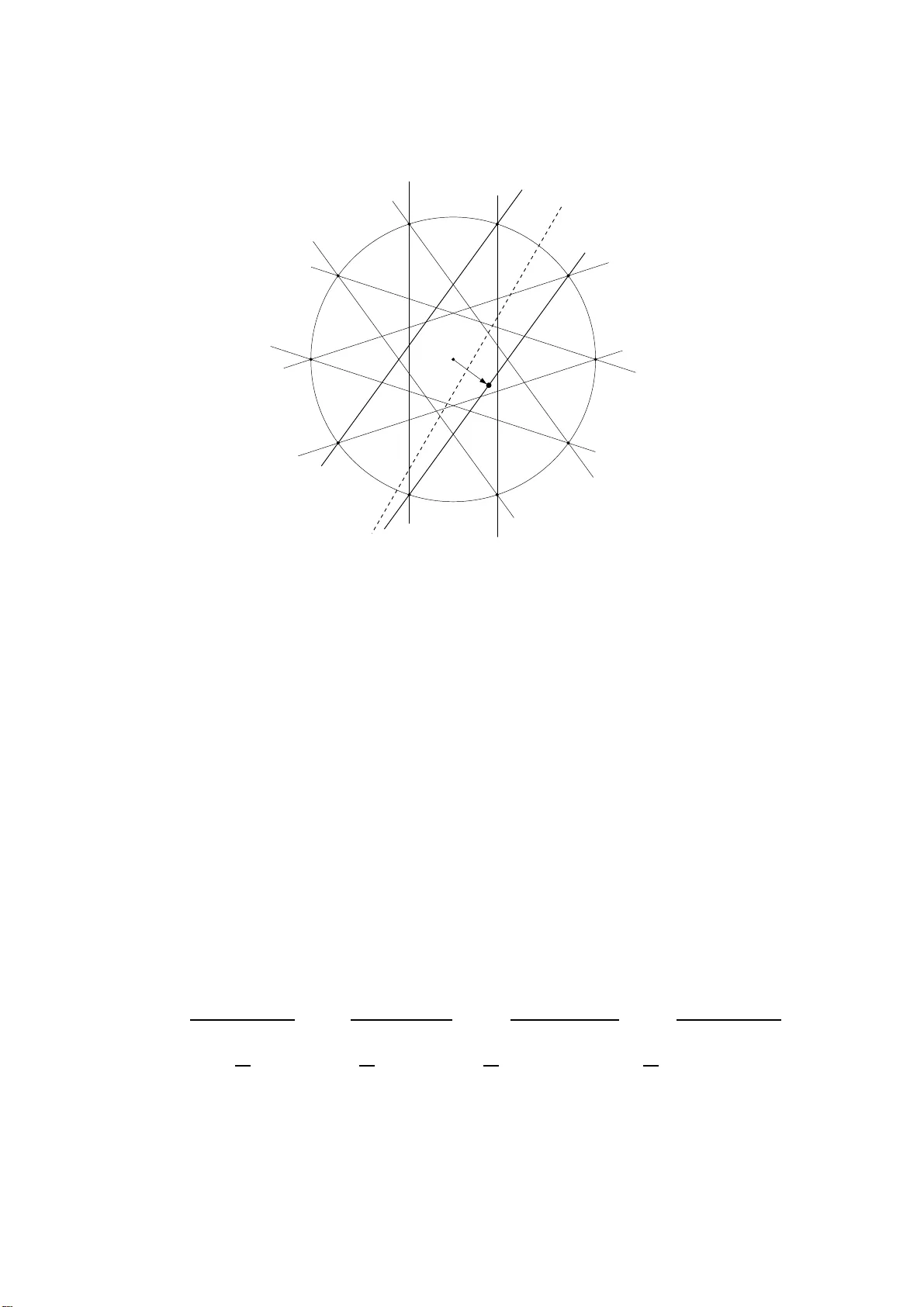
The parameterized complexit y of some geometric problems in un b ounded dimension P anos Giannop ou l os ∗ † Christ i an Knauer ∗ † G ¨ un ter Rote ∗ Abstract W e st udy t he parameterized complexit y of the foll o wing fund amen ta l geomet ric problems with resp ect to the dim en sion d : i) Giv en n p oin ts in R d , compute their minimum enclosing cylinder. ii) Giv en tw o n -p oint sets in R d , decide whether th ey can b e separated b y t wo h yp erplanes. iii) Giv en a system of n linear inequalities with d v ariables, find a maximum-size feasible subsys tem. W e sho w that (the d ecisio n v ersions of ) all these problems are W[1]-hard when pa- rameterized by the dimension d . Our reductions also giv e a n Ω( d ) -time lo wer b ound (under the Exp onential Time Hyp othesis). Keywor ds: p ar ameterize d c omplexity, ge ometric dimension, lower b ounds, minimum enclosing cylinder, maximum fe asible subsystem, 2-line ar sep ar ability. 1 In tro duction W e study the parameterized complexit y o f the follo wing three fundamen tal g eometric prob- lems with resp ect to the dimension of the underlying space: minim um enclosing cylinder of a set of p o in ts in R d , 2-linear separation of tw o p oin t sets in R d , and maxim um-size feasible subsystem of a system o f linear inequalities with d v ariables. All these problems are NP-hard when the dimension d is un b ounded and all kno wn exact algorit hms run in n O ( d ) time (ba sically , using brute force), w here n is the total n um b er of o b jects in the input sets. As with man y other geometric problems in d dimensions, it is widely conjectured that the dep endence o n d cannot b e remo ve d from the exp onen t of n . Ho wev er, no evidence of this has b een given so fa r. In terms of parameterized complexity theory the question is whether an y of these pro b- lems is fixed-parameter tra ctable with resp ect to d , i. e., whether there exists an algorithm ∗ Institut f ¨ ur Infor matik, F re ie Universit¨ a t Ber lin, T akustraße 9, D-1 4 195 B erlin, Germa n y , { pa nos, knauer, rote } @inf.fu-b erlin.de. † This research was supp orted b y the Ger man Science F oundatio n (DFG) under g ran t Kn 591 /3-1. 1 that runs in O ( f ( d ) n c ) time, for some computable function f and some constan t c inde- p enden t of d . Pro ving a problem to b e W[1]-hard with respect to d , giv es a strong evidence that suc h an algorithm is not p ossible, under standard complexit y theoretic assumptions. W e summarize our results b ello w. Results. W e study the follo wing decision problems: i) Giv en n unit balls R d , decide whether there is a line that stabs all the balls. (Note that since the balls are unit, this is the decision v ersion of the problem of computing the minimum enclosing cylinder of a set of n p oin ts.) ii) Giv en t wo n -p oin t sets in R d , decide whether they can b e separated b y t wo hy p er- planes. iii) Giv en a system of n linear inequalities with d v ariables and an in teger l , decide whether t here is a solution satisfying l of the inequalities. W e pro ve that all three problems are W[1]-hard with resp ect to d . This is done b y fpt-reductions from the k - indep enden t s et (or clique) problem in general graphs, whic h is W[1]-complete [9]. As a side-result, w e also show that, when restricted to equalities, problem (iii) is W[1]-ha rd with resp ect to b oth l and d . The reductions for problems (i) and (ii) are based on a tec hnique pioneered in Cab ello et al. [7], see next section. With the addition of these t w o problems this tec hnique shows a generic trait and its p oten tial as a useful to ol for pro ving hardness of geometric problems with respect to the dimension. In all three reductions the dimension is linear in the size k of the indep enden t set (or clique), hence an n o ( d ) -time alg orithm for any of the problems implies an n o ( d ) -time alg o- rithm for the parameterized k -clique problem, whic h in turn implies that n - v aria ble 3SA T can b e solv ed in 2 o ( n ) -time. The Exponen tial Time Hy p othesis (ETH) [11] conjectures that no suc h algorithm exists. Related w ork. The dimension of geometric problems is a natural parameter for studying their parameterized complexit y . Ho w ev er, there are only few results o f this t yp e: La nger- man and Morin [12] ga v e fixed-parameter tractabilit y results for the problem of co vering p oin ts with hyperplanes, while the ‘dual’ parameterization of the maxim um-size feasible subsyste m problem, where parameter l is no w the smallest num b er o f inequalities one has to remov e to mak e the system feasible is fixed-parameter t r actable with resp ect t o b oth l and d [4]. As f or hardness results, the problems o f co v ering p oin ts with balls and com- puting the v olume of the union of axis parallel b o xes hav e b een sho wn to b e W[1]- hard b y Cab ello et al. [7] and Chan [8] resp ectiv ely . W e refer the reader to Giannop oulos et al. [10] for a surv ey on parameterized complexit y results for geometric pro blems. The problem of stabbing balls in R d with one line w as sho wn t o b e NP-hard when d is part of the input b y Megiddo [14]. This problem is equiv alen t to the minimum en- closing cylinder problem for p oin ts, see V aradara jan et al. [15]. Exact and appro ximation algorithms for the latter problem can b e found, for example, in B˘ adoiu et al. [5 ]. 2 Megiddo [13] sho w ed that the problem of se parating tw o p oin t sets in R d b y tw o h yp er- planes is NP-hard. He also sho w ed that the general problem of separating tw o p oin t sets b y l h yp erplanes can be solv ed in po lynomial time whe n b oth d a nd l are fixed . The complexit y of the maxim um- size feasible subsystem problem was studied in Amaldi and Kann [1]. Seve ral results on the hardness of approximabilit y can also b e found in this pap er, as well a s in Arora et al. [3]. F or exact and appro ximation algorithms for this and sev eral related pro blems see Arono v and Har- P eled [2]. 2 Preliminaries 2.1 Metho dology As men tio ned ab ov e, all three hardness results use a reduction from the k -indep enden t set (or clique ) problem. Using the tec hnique in [7 ], we construct of a sc affold ing structure that restricts the solutions to n k com binatoria lly different solutions, whic h can b e in terpreted as p oten tial k - cliques in a gra ph with n v ertices. Additional c onstr aint ob jects will then enco de the edges of the input graph. The main ideas are the follow ing. W e construct geometric instances whic h lie in Eu- clidean space whose dimension dep ends only on k . Note that the lo w er the dep endence on k , the b etter the lo we r b ound w e get from the hardness result. In our case the de- p endence is linear. The scaffolding structure is hig hly symmetric. It is comp osed of k symmetric subsets of a linear (in n ) num b er of ob jects t ha t lie in o rthogonal subspaces. Orthogonality tog ether with the sp ecific geometric prop erties of each problem a llows us to restrict the solutions to n k com binatoria lly differen t solutions. The w ay of placing the constrain t o b jects is crucial: eac h ob ject lies in a 4-dimensional subspace and cancels an exp o nen tial n umber of solutio ns. Mo del of computation. The geometry of the constructions in Sections 3, 4 will b e described as if exact square ro ots and expressions of the form sin π n w ere a v ailable. T o make the r eduction suitable for the T uring mac hine mo del, the da ta mus t b e p erturb ed using fixed-precision ro undings. This can b e done with polynomially man y bits in a wa y similar to the rounding pro cedure follo w ed in [7 , 6]. W e omit the details here. The construction in Section 5 uses small in tegral data. 2.2 Notation Let [ n ] = { 1 , . . . , n } and G ([ n ]) , E ) b e an undirected g raph. In sections 3, 4, it will b e conv enien t to view R 2 k as the pro duct o f k ortho gonal planes E 1 , . . . , E k , where eac h E i has co ordinate axes X i , Y i . The origin is denoted b y o . The co ordinates of a p o in t p ∈ R 2 k are denoted by ( x 1 ( p ) , y 1 ( p ) , . . . , x k ( p ) , y k ( p )). The notions of a p oin t and v ector will be used in terchangeably . W e denote b y C i the unit circle on E i cen tered at o . 3 3 Minim um enclos ing c ylinder (or stabbing balls with one li ne) Giv en an undirected graph G ([ n ] , E ) we construct a set B of balls o f equal radius r in R 2 k suc h that B can b e stabb ed by a line if and only if G has an independen t set of size k . F or ev ery ball B ∈ B w e will also ha v e − B ∈ B . This allows us to restrict our atten tio n to lines through the origin: a line that stabs B can b e translated so that it go es through the origin and still stabs B . In this section, b y a line we alw ay s mean a line through t he origin. F or a line l , let ~ l b e its unit direction v ector. F or eac h plane E i , w e define 2 n 2 k -dimensional balls, whose cen ters c i 1 , . . . , c i 2 n are regularly spaced on the unit circle C i . Let c iu ∈ E i b e the cen ter of the ball B iu , u ∈ [2 n ], with x i ( c iu ) = cos ( u − 1) π n , y i ( c iu ) = sin ( u − 1) π n . W e define the scaffolding ball set B 0 = { B iu , i = 1 , . . . , k and u = 1 , . . . , 2 n } . W e hav e |B 0 | = 2 nk . All balls in B 0 will hav e the same radius r < 1, to b e defined later. Tw o antipo dal balls B , − B are stabb ed b y the same set of lines. A line l stabs a ball B of radius r and cen ter c if and only if ( c · ~ l ) 2 ≥ k c k 2 − r 2 . Th us, l stabs B 0 if and only if it satisfie s the following system o f nk inequalities: ( c iu · ~ l ) 2 ≥ k c iu k 2 − r 2 = 1 − r 2 , for i = 1 , . . . , k and u = 1 , . . . , n. Consider the inequalit y asserting that l stabs B iu . Geometrically , it amounts to saying that the pro jection ~ l i of ~ l on the plane E i lies in one of the half- planes H + iu = { p ∈ E i | c iu · p ≥ p k c iu k 2 − r 2 } or H − iu = { p ∈ E i | c iu · p ≤ − p k c iu k 2 − r 2 } . Consider t he situation on a plane E i . Lo oking a t all half-planes H + i 1 , H − i 1 , . . . , H + in , H − in , we see that l stabs all balls B iu (cen tered on E i ) if and and only if ~ l i lies in one of the 2 n w edges ± ( H − i 1 ∩ H + i 2 ) , . . . , ± ( H − i ( n − 1) ∩ H + in ) , ± ( H − i 1 ∩ H − in ); see Fig. 1. The apices of the w edges are r egularly spaced on a circle of radius λ = p 2(1 − r 2 ) / (1 − cos π n ), and define the set A i = {± λ cos(2 u − 1) π 2 n , λ sin(2 u − 1) π 2 n ∈ E i , u = 1 , . . . , n } . F or l to stab all balls B iu , we m ust hav e that k ~ l i k ≥ λ . W e c ho ose r = p 1 − (1 − cos π n ) / (2 k ) in o rder to o bt a in λ = 1 / √ k . Since the ab o ve hold for ev ery plane E i , a nd since ~ l ∈ R 2 k is a unit ve ctor, w e ha v e 1 = k l k 2 = k l 1 k 2 + · · · + k l k k 2 ≥ k λ 2 = 1 . Hence, equality holds throughout, whic h implies that k ~ l i k = 1 / √ k , f o r ev ery i ∈ { 1 , . . . , k } . Hence, for line l to stab all balls in B 0 , ev ery pro jection ~ l i m ust b e o ne of t he 2 n apices in A i . Eac h pro jection ~ l i can b e chose n indep ende n t ly . There are 2 n c hoices, but since ~ l and − ~ l corresp ond to the same line, the total n um b er of lines that stab B 0 is n k 2 k − 1 . 4 c i 1 c i 2 wedge H + i 1 H − i 1 H + i 2 H − i 2 o ~ l i λ apex π n Figure 1: Cen ters of the balls and their resp ectiv e half-planes and wedges on a plane E i , for n = 4. F or a tuple ( u 1 , . . . , u k ) ∈ [2 n ] k , w e will denote by l ( u 1 , . . . , u k ) the stabbing line with direction vec tor 1 √ k cos(2 u 1 − 1) π 2 n , sin(2 u 1 − 1) π 2 n , . . . , cos(2 u k − 1) π 2 n , sin(2 u k − 1) π 2 n . Tw o lines l ( u 1 , u 2 , ..., u k ) and l ( v 1 , v 2 , ..., v k ) ar e said to b e equiv alen t if u i ≡ v i (mo d n ), for all i . This relation defines n k equiv alence classe s L ( u 1 , . . . , u k ), with ( u 1 , . . . , u k ) ∈ [ n ] k , where each class consists of 2 k − 1 lines. F rom the discussion ab ov e, it is clear that there is a bijection b et w een the p ossible equiv alence classes of lines that stab B 0 and [ n ] k . 3.1 Constrain t balls W e con tin ue the construction of the ball set B b y sho wing how to enco de the structure of G . F or eac h pair of distinct indices i 6 = j (1 ≤ i, j ≤ k ) a nd for eac h pair of (p ossibly equal) v ertices u, v ∈ [ n ], we define a c onstr aint s e t B uv ij of balls with the prop ert y that (all lines in) all classes L ( u 1 , . . . , u k ) stab B uv ij except those with u i = u and u j = v . The cen ters of the balls in B uv ij lie in the 4-space E i × E j . Observ e that all lines in a particular class L ( u 1 , . . . , u k ) pro ject on t o only t wo lines o n E i × E j . W e use a ball B uv ij (to b e defined shortly) of radius r that is stabb ed by al l lines l ( u 1 , . . . , u k ) exc ept those with u i = u and u j = v . Similarly , w e use a ball B u ¯ v ij that is stabb ed b y al l lines l ( u 1 , . . . , u k ) exc ept those with u i = u and u j = ¯ v , where ¯ v = v + n . Our constrain t set consists then o f the four balls B uv ij = {± B uv ij , ± B u ¯ v ij } . 5 W e describe no w t he placemen t of a ball B uv ij . Consider a line l = l ( u 1 , . . . , u k ) with u i = u a nd u j = v . The cen ter c uv ij of B uv ij will lie on a line z ∈ E i × E j that is ort hogonal to ~ l , but not orthogo na l to any line l ( u 1 , . . . , u k ) with u i 6 = u or u j 6 = v . W e c ho ose the direction ~ z of z as follo ws: x i ( ~ z ) = µ (cos θ i − 3 n sin θ i ) , y i ( ~ z ) = µ (sin θ i + 3 n cos θ i ) , x j ( ~ z ) = µ ( − cos θ j − 6 n 2 sin θ j ) , y j ( ~ z ) = µ ( − sin θ j + 6 n 2 cos θ j ) , where θ i = (2 u − 1) π 2 n , θ j = (2 u − 1) π 2 n , and µ = 1 / (9 n 2 + 36 n 4 + 2) . It is straigh tforward to che c k that ~ l · ~ z = 0. Let ω b e the angle b etw een ~ l ′ and ~ z . W e hav e the following lemma: Lemma 1. F o r any line l ′ = l ( u 1 , . . . , u k ) , with u i 6 = u or u j 6 = v the angle ω b etwe en ~ l ′ and ~ z s atisfies | cos ω | > µ √ k . Pr o of. Without loss of generalit y w e consider a fixed direction ~ z where θ i = θ j = π 2 n (i. e., u = v = 1). Consider ~ l ′ with x i ( ~ l ′ ) = cos θ , y i ( ~ l ′ ) = sin θ , x j ( ~ l ′ ) = cos φ , and y j ( ~ l ′ ) = sin φ , where θ = (2 u i − 1 ) π 2 n and φ = (2 u j − 1 ) π 2 n , w ith ( u i , u j ) 6 = (1 , 1) and ( u i , u j ) 6 = ( n + 1 , n + 1). After stra ig h tforw ard calculations w e hav e that | cos ω | = | ~ l ′ · ~ z | = µ √ k | α | , where α = cos( u i − 1) π n + 3 n sin( u i − 1) π n − cos( u j − 1) π n + 6 n 2 sin( u j − 1) π n . W e will sho w that | α | > 1 . W e will use t he inequalit y: | sin( u i − 1) π n | ≥ | sin π n | > 1 n , whic h holds for all 1 ≤ u i ≤ 2 n , with u i 6 = 1, u i 6 = n + 1, and n ≥ 4. W e examine the follo wing cases: (i) u j 6 = 1 and u j 6 = n + 1. Then u i can ta k e any v alue. W e ha ve | α | ≥ | 6 n 2 sin( u j − 1) π n | − | cos( u j − 1) π n − cos( u i − 1) π n − 3 n sin( u i − 1) π n | > | 6 n 2 · 1 n − | 2 + 3 n || = 3 n − 2 > 1 . (ii) u j = 1. Then u i 6 = 1. If also u i 6 = n + 1, we hav e | α | ≥ | 0 − 1 + 3 n sin( u i − 1) π n + cos ( u i − 1) π n | > | − 1 + 3 n · 1 n − 1 | = 1 . If u i = n + 1, then | α | = 2. (iii) u j = n + 1. Then u i 6 = n + 1. The tw o cases where u i 6 = 1 or u i = 1 are dealt with similarly to the previous case. 6 This low er b ound on | cos ω | helps us place B uv ij sufficien tly close to the or ig in so that it is still intersec ted b y l ′ , i. e., ~ l ′ lies in one of the half-spaces c uv ij · p ≥ q k c uv ij k 2 − r 2 or c uv ij · p ≤ − q k c uv ij k 2 − r 2 , p ∈ R 2 k . W e claim that a ny po in t c uv ij on z with r < k c uv ij k < q k k − µ 2 r will do. F or any p osition of c uv ij on z with k c uv ij k > r , w e ha v e ( c uv ij · ~ l ) 2 = 0 < k c uv ij k 2 − r 2 , i. e., l does not stab B uv ij . On the other hand, a s argued ab ov e w e need that | c uv ij · ~ l ′ | ≥ q k c uv ij k 2 − r 2 . Since c uv ij · ~ l ′ = cos ω · k c uv ij k , w e ha ve the condition | cos ω | ≥ q 1 − r 2 k c uv ij k 2 . By Lemma 1 we kno w that | cos ω | > µ √ k , hence b y c ho osing k c uv ij k so that µ √ k > q 1 − r 2 k c uv ij k 2 w e are done. Reduction. Similarly to [7], the structure of the input graph G ([ n ] , E ) can now be represen ted as follows. W e add to B 0 the 4 n k 2 balls in B V = S B uu ij , 1 ≤ u ≤ n, 1 ≤ i < j ≤ k , to ensure that all comp onen ts u i in a solution (class of lines L ( u 1 , . . . , u k )) are distinct. F or each edge u v ∈ E w e a lso a dd the balls in k ( k − 1) sets B uv ij , with i 6 = j . This ensures that the remaining classes of lines L ( u 1 , . . . , u k ) represen t indep ende n t sets of size k . In total, the edges are represen ted by the 4 k ( k − 1) | E | balls in B E = S B uv ij , u v ∈ E , 1 ≤ i, j ≤ k , i 6 = j . The final set B = B 0 ∪ B V ∪ B E has 2 nk + 4 k 2 ( n + 2 | E | ) balls. As noted in ab ov e, there is a bijection betw een the p ossible equiv alence classes of lines L ( u 1 , . . . , u k ) that stab B and the tuples ( u 1 , . . . , u k ) ∈ [ n ] k . The constrain t sets of balls exclude tuples with tw o equal indices u i = u j or with indices u i , u j when u i u j ∈ E , th us, the classes of lines that stab B represen t exactly the indep enden t sets of G . Th us, we ha v e the fo llo wing: Lemma 2. Set B c an b e stabb e d by a line i f an only if G has an indep endent set of size k . F rom this lemma and since this is an fpt-reduction, w e conclude: Theorem 3. D e ciding whether n unit b al ls in R d c an b e stabb e d with one line is W[1] -har d with r esp e ct to d . 4 Separating t w o p oin t sets b y tw o hyp erplanes Let P and Q b e tw o p oin t sets in R d . Tw o hyperplanes split space generically in to f our “quarters”. There are three differen t vers ions of what it means to separate P and Q b y t wo h yp erplanes: (a) Eac h quart er contains only p oints of one set. (b) The set Q is con tained in one quarter only , and set P can p opulate the remaining three quarters. (c) Same a s (b), but the ro les of P and Q are not fixed in adv ance. 7 In the fo llo wing w e work only with v ersion (a), which is the most general. F or the p oin t sets that we construct, it will turn o ut that if a separation according to (a) exists, it will also b e v alid by (b) and (c). Th us, our reduction w orks for all three v ersions of the problem. Separation according to ( a) is equiv alen t to requiring that ev ery segmen t pq b et w een a p oin t p ∈ P and a point q ∈ Q is in tersected by one of the tw o h yp erplanes. Note that we restrict our atten tion to strict separatio n, i. e., no h yp erplane can go thro ugh a p oin t of P or Q . (The r esult extends to w eak separation; see the end of this section.) Giv en an undirected graph G 0 ([ n 0 ] , E 0 ) with n 0 ≥ 2 and an in teger k , w e construct t w o p oin t se ts P and Q in R 2 k with the prop ert y that they can be separated by t w o h yp erplanes if and only if G 0 has an indep enden t set of size k . F or tec hnical reasons, w e duplicate the v ertices of the graph: w e build a new graph with n = 2 n 0 v ertices. Ev ery v ertex u ∈ [ n 0 ] of the original graph g ets a second cop y u ′ := u + n 0 , and for ev ery original edge uv , there are no w four edges uv , uv ′ , u ′ v , u ′ v ′ . The new g raph G ( [ n ] , E ) has a n indep enden t set of size k if and only if the original graph has such a set. On each plane E i , i = 1 , . . . , k , w e define a set P i of n p oin ts regularly spaced on the circle C i : P i = { p iu ∈ E i | x i ( p iu ) = cos ( u − 1) 2 π n , y i ( p iu ) = sin ( u − 1) 2 π n , u = 1 , . . . , n } . F or an index u ∈ [ n ], it will b e conv enien t to define its antip o dal and almost antip o dal partner u ′ = u + n 2 and ¯ u = u + n 2 + 1 resp ectiv ely . (All indices ar e mo dulo n ). Th us we are exte nding the nota tion u ′ to all (original and new) v ertices u , with ( u ′ ) ′ = u . The scaffolding is define d b y t w o sets P = S P i and Q 0 = { o } . W e hav e | P | = nk . Since the p oin ts in eac h P i are regularly spaced on C i , a hy p erplane that do es not con tain the origin c an in tersect at mo st n/ 2 segmen ts op iu on eac h plane E i . Hence, at least t wo hyperplanes ar e needed to separate P and Q 0 . Actually , t w o suffice. One h yp erplane can inte rsect the n/ 2 consecutiv e (in a coun ter-clo ck wise order) segmen ts op i ¯ u i , . . . , op iu i on eac h E i , for a c hoice of u i ∈ [ n ] (see F ig . 2). There is an infinite num b er of suc h h yp erplanes, forming an equiv alence class H ( u 1 , . . . , u k ). Since the planes E 1 , . . . , E k are orthogonal, eac h u i indep enden tly defines whic h of the n/ 2 consecutiv e segmen ts on E i are in tersected b y a hyperplane in H ( u 1 , . . . , u k ). The remaining n/ 2 segmen ts − op i ¯ u i , . . . , − op iu i on each E i can t hen b e in t ersected b y an y h yp erplane in the ‘complemen tary’ class H ( u ′ 1 , . . . , u ′ k ) = {− H | H ∈ H ( u 1 , . . . , u k ) } . Effectiv ely , every hyperplane in H ( u 1 , . . . , u k ) separates Q 0 from the k n 2 -p oin t set P ( u 1 , . . . , u k ) = { p 1 ¯ u 1 , . . . , p 1 u 1 } ∪ · · · ∪ { p k ¯ u k , . . . , p k u k } . Concluding, there a re n k p ossible part itions of P into t w o groups, eac h separated from Q 0 b y one h yp erplane, in corresp ondence to the n k p ossible tuples ( u 1 , . . . , u k ) ∈ [ n ] k : Lemma 4. The p ossible p airs of hyp erplanes that sep ar ate P fr om Q 0 ar e of the form h, h ′ with h ∈ H ( u 1 , . . . , u k ) and h ′ ∈ H ( u ′ 1 , . . . , u ′ k ) , for som e ( u 1 , . . . , u k ) ∈ [ n ] k . Since by construction, the graph G has t he pro p erty tha t u v ∈ E iff u ′ v ′ ∈ E , the separating pairs o f hy p erplanes h, h ′ can b e used to enco de the p oten tial indep enden t sets { u 1 , . . . , u k } : it do es not matter whic h of h and h ′ w e c ho ose, the corresp onding v ertex set will b e an indep enden t set in b oth case s, or a dependen t set in b oth cases. 8 c uv ij a p i 1 p i 2 p i 8 p i 9 p i 10 H ( u 1 , . . . , u k ) H ( u ′ 1 , . . . , u ′ k ) H o Figure 2: P oint set P i , f or n = 10 , a hyperplane H in the class H ( u 1 , . . . , u k ) and the corresp onding b oundary h yp erplane H ( u 1 , . . . , u k ) for u i = 2. The placeme n t of q uv ij is sho wn in a t w o-dimensional analog. 4.1 Constrain t p oin ts F or eac h pair of indices i 6 = j (1 ≤ i, j ≤ k ) a nd for eac h pair of ( p ossibly equal) v ertices u, v ∈ [ n ], w e will define a constrain t p oint q uv ij ∈ E i × E j with the follow ing prop ert y: in ev ery class H ( u 1 , . . . , u k ), there is a hyperplane that separates { q uv ij } from P ( u 1 , . . . , u k ) except those classes with u i = u and u j = v (in whic h case no suc h h yp erplane exists). In this w a y , no partition of P in to sets P ( u 1 , . . . , u k ) and P ( u ′ 1 , . . . , u ′ k ) with u i = u and u j = v will be p ossible suc h that eac h set is separated fr o m Q 0 ∪ { q uv ij } b y a h yp erplane. Let H ( u 1 , . . . , u k ) b e the unique hyperplane through the 2 k affinely indep ende n t p oin ts p 1 u 1 , p 1 ¯ u 1 , . . . , p k u k , p k ¯ u k . Note that H ( u 1 , . . . , u k ) is not in the class H ( u 1 , . . . , u k ), since w e w ant strict separatio n; informally , H ( u 1 , . . . , u k ) lies at the bo undary of H ( u 1 , . . . , u k ), with an appropriate parameterization of h yp erplanes: mov ing H ( u 1 , . . . , u k ) tow ards the origin by a sufficie n tly small amount leads t o a h yp erplane in H ( u 1 , . . . , u k ). W e define the constrain t p oin t q uv ij as the cen t roid of the four p oints p iu , p i ¯ u , p j v , p j ¯ v . Its nonzero co ordinates are x i = cos θ i + cos ¯ θ i 4 , y i = sin θ i + sin ¯ θ i 4 , x j = cos θ j + cos ¯ θ j 4 , y j = sin θ j + sin ¯ θ j 4 , for θ i = ( u − 1) 2 π n , ¯ θ i = ( ¯ u − 1) 2 π n , θ j = ( v − 1 ) 2 π n , and ¯ θ j = ( ¯ v − 1) 2 π n . Lemma 5. If u i = u and u j = v , no hyp erplane in H ( u 1 , . . . , u k ) sep ar ates q uv ij fr om P ( u 1 , . . . , u k ) . 9 Pr o of. Suc h a h yp erplane w ould in particular ha v e to separate q uv ij from p iu , p i ¯ u , p j v , p j ¯ v , whic h is imp ossible. T o see that q uv ij do es not “destro y” the classes H ( u 1 , . . . , u k ) with u i 6 = u or u j 6 = v , let us consider a fixed pair of indices i 6 = j . All p oin t s q uv ij , ( u, v ∈ [ n ]) lie on a sphere S ij around the origin in E i × E j (of radius p 1 / 2 · sin π n ). The inters ection H ( u 1 , . . . , u k ) ∩ ( E i × E j ) is a 3-dimensional hyperplane F u i u j ij uniquely defined by u i and u j : F u i u j ij go es through the four p oin ts p iu i , p i ¯ u i , p j u j , p j ¯ u j . Moreo ve r, q u i u j ij is the p oin t where F u i u j ij touc hes the sphere S ij . (This f ollo ws from symmetry considerations, and it can also b e c hec ked by a straigh t f orw ard calculation that the v ector q u i u j ij is p erpendicular to the hy p erplane F u i u j ij .) This a llo ws us to conclude : Lemma 6. If u i 6 = u or u j 6 = v , then q uv ij lies on the same side of the hyp erplane H ( u 1 , . . . , u k ) as the origin o . Pr o of. The p oin t q uv ij lies on the sphere S ij ∈ E i × E j cen tered at the origin. T his sphere lies on the same side of H ( u 1 , . . . , u k ) as the origin, except for the p oin t where it touc hes H ( u 1 , . . . , u k ). But this touching p oint q u i u j ij is different from q uv ij . This means that q uv ij and the p oints in P ( u 1 , . . . , u k ) are o n differen t sides of the hyper- plane H ( u 1 , . . . , u k ) (except for the p oints p 1 u 1 , p 1 ¯ u 1 , . . . , p k u k , p k ¯ u k , whic h lie o n it). Since q uv ij / ∈ H ( u 1 , . . . , u k ), ev ery sufficien tly close translate of H ( u 1 , . . . , u k ) in H ( u 1 , . . . , u k ) with u i 6 = u or u j 6 = v separates P ( u 1 , . . . , u k ) and { q uv ij } . Reduction. Similarly to the reduction in Section 3, w e enco de the structure of G b y adding to Q 0 the n k 2 constrain t p oin ts q uu ij (1 ≤ u ≤ n, 1 ≤ i < j ≤ k ) and 2 | E | k 2 constrain t p oints q uv ij ( uv ∈ E and i 6 = j ). Let Q b e the resulting p oin t set. Then the p ossible partitions of P in to tw o sets, eac h separated f rom Q by one hy p erplane, represen t the indep enden t sets of G . Lemma 7. Sets P and Q c an b e sep ar ate d by two hyp erplanes if and only if G has an indep endent set of size k . F rom this lemma, and since this is an fpt-reduction, w e conclude with the follo wing: Theorem 8. De ciding wh e ther two p oint sets P , Q in R d c an b e sep ar ate d by two hyp er- planes is W[1 ] - h ar d with r esp e ct to d . Remark. The construction a bov e dep ends on requiring strict separation, i. e., the sepa- rating h yp erplanes are not allo w ed to go thro ugh t he given p oin ts. F or the fixe d-precision appro ximation that is necessary to mak e the reduction suitable for a T uring mac hine, w e ha ve to mo ve the constrain t p oints q uv ij a little bit further a wa y from the cen ter b efore rounding them to rational co ordinates. The statemen t of Lemma 5 is refined and excludes the p ossibilit y of separating P ( u 1 , . . . , u k ) from the set { o, q uv ij } rather tha n from the p oin t q uv ij alone. 10 These mo difications are also suitable for the v ersion of the problem where we ak sep ar a- tion is allow ed, i. e., p oin ts on the separatio n b oundary can b e from P or Q a rbitrarily . In this case 2 k 2 additional p oin ts on the co ordinate planes close to the origin m ust b e added to Q 0 , in order to eliminate the co ordinate h yp erplanes as p oten tial separating h yp erplanes. 5 Maxim um-size fe asible subs ystem W e first consider the sp ecial problem: Giv en a system of linear equations find a solution that satisfies as many equations as p ossible. (Note that this problem is dual to the problem of co vering as many po ints as p ossible b y a h yp erplane through the origin.) The decision v ersion of this problem is as follo ws: Give n a set of n h yp erplanes in R d and an in teger l , decide whether there exists a po int in R d that is co v ered b y at least l of the hy p erplanes. In the f ollo wing, ~ x = ( x 1 , . . . , x k ) ∈ R k denotes a k -dimensional v ector (a notat io n that is sligh tly different from the one used in the previous sections). W e iden t if y the grid [ n ] k with the set of v ectors in R k with integer co ordinates in [ n ]. F or a set H of h yp erplanes in R k and a p oin t ~ x ∈ R k w e define depth( ~ x, H ) = |{ h ∈ H | ~ x ∈ h }| . Giv en an undirected g raph G ([ n ] , E ) and k ∈ N , w e will no w construct a set H G,k of nk + 2 | E | k 2 h yp erplanes in R k suc h that G has a cliqu e of size k if and only if there is a p oin t ~ x ∈ R k with depth ( ~ x, H G,k ) = k + k 2 . F or 1 ≤ i ≤ k and 1 ≤ v ≤ n w e define the hy p erplane h v i = { ~ x | x i = v } . The scaffolding h yp erplane set H 0 = { h v i | 1 ≤ i ≤ k , 1 ≤ v ≤ n } consists of nk hy p erplanes. An y p oin t ~ x is contained in at most k h yp erplanes in H 0 ; equalit y is realized for the p oin ts in [ n ] k : Lemma 9. depth( ~ x, H 0 ) ≤ k fo r an y ~ x ∈ R k , and depth( ~ x, H 0 ) = k if and only if ~ x ∈ [ n ] k . F or 1 ≤ i < j ≤ k and 1 ≤ u, v ≤ n we define the h yp erplane h uv ij = { ~ x | ( x i − u ) + n ( x j − v ) = 0 } . This hyperplane contains only those p oints ~ x o f the g rid for whic h x i = u and x j = v : Lemma 10. ~ x ∈ h uv ij ∩ [ n ] k if and only if x i = u and x j = v . Pr o of. Assume ~ x ∈ h uv ij ∩ [ n ] k , i. e. ( x i − u ) + n ( x j − v ) = 0 a nd x i , x j ∈ [ n ]. If x i 6 = u , the left-hand side of the equation is no t divisible b y n and th us cannot b e 0. Therefore, x i = u and th us, x j = v . The other direction is obvious. F or 1 ≤ i < j ≤ k w e define the set H E ij = { h uv ij | uv ∈ E or v u ∈ E } of 2 | E | h yp erplanes. All these h yp erplanes ar e parallel; th us a p oin t is con tained in at most o ne h yp erplane of H E ij . By Lemma 10, a p oint ~ x ∈ [ n ] k is contained in a hyperplane of H E ij if and only if x i x j is an edge o f E . W e define the set H E = S 1 ≤ i
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment