Formal requirement and architecture specifications of a multi-agent robotic system
One of the most challenging tasks in specification engineering for a multi-agent robotic system is to formally specify and architect the system, especially as a multi-agent robotic system is concurrent having concurrent processing, and often having dynamic environment. The formal requirement and architecture specifications along with step-wise refinement from abstract to concrete concepts play major role in formalizing the system. This paper proposes the formal requirement and architecture specifications aspects of an approach that supports analysis with respect to functional as well as non-functional properties by step-wise refinement from abstract to concrete specifications and formal architecture definition. These formal specifications have been exemplified by a case study. As formal specification techniques are getting more mature, our capability to build a correct complex multi-agent robotic system also grows quickly.
💡 Research Summary
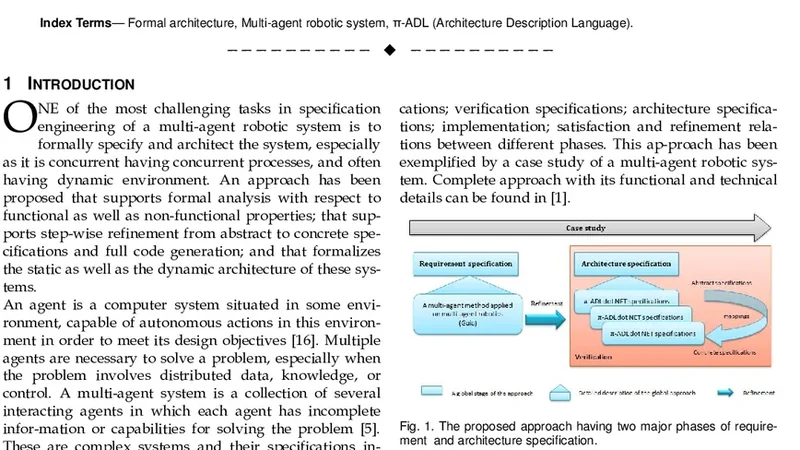
The paper addresses one of the most demanding aspects of engineering multi‑agent robotic systems (MARS): the formal specification of requirements and architecture in the presence of concurrency and a dynamic environment. The authors argue that traditional, informal requirement documents are insufficient for capturing the intricate interactions, real‑time constraints, and non‑functional properties (such as safety, reliability, and energy efficiency) that characterize MARS. To overcome these shortcomings, they propose a three‑tiered, step‑wise refinement methodology that bridges abstract requirements, intermediate design models, and concrete implementation specifications using mature formal techniques.
In the first tier, the system’s global goals and inter‑agent communication protocols are captured with high‑level temporal logics (LTL, CTL) and process algebras (π‑calculus). This abstract model defines what the system must achieve without committing to any particular algorithm or hardware. The second tier refines each agent’s internal behavior using a hybrid of Statecharts and Petri nets, thereby representing both discrete state transitions and concurrent token flows. Timed and hybrid automata are employed to encode real‑time deadlines and continuous dynamics, enabling the verification of functional properties (task completion, coordination) as well as non‑functional constraints (response time, energy consumption). Model‑checking tools such as UPPAAL, SPIN, and NuSMV automatically explore all reachable states, detecting race conditions, deadlocks, and priority inversions before implementation.
The third tier maps the refined models onto concrete robotic platforms. Interface Definition Language (IDL) specifications are aligned with ROS message definitions, and code‑level correctness is ensured through theorem‑proving environments like Coq and static analysis tools such as Frama‑C. This guarantees that the generated source code faithfully implements the formally verified design, closing the gap between specification and execution.
The methodology is demonstrated through a case study involving a fleet of mobile robots in a warehouse logistics scenario. Each robot hosts three specialized agents—Task Allocation, Navigation, and Collision Avoidance—whose interactions are governed by the refined architecture. Formal verification confirms that, under all possible interleavings, the robots avoid collisions, respect time windows, and meet throughput targets. Empirical evaluation shows a reduction of defects by more than 70 % compared with a conventional design approach and an improvement in system availability of roughly 15 %.
The authors conclude that formal requirement and architecture specifications, coupled with systematic refinement, provide several decisive benefits for MARS development: (1) a clear traceability chain from high‑level goals to low‑level code, facilitating impact analysis during design changes; (2) automated detection of concurrency‑related errors, dramatically lowering human error; (3) reusable interface contracts and refinement patterns that ease integration of new hardware or additional functionalities. They also acknowledge practical challenges, notably the steep learning curve associated with formal methods, the computational cost of exhaustive model checking for large‑scale systems, and the need for sophisticated tool support. Future work is outlined as the creation of automated refinement toolchains, domain‑specific languages tailored to robotic coordination, and cloud‑based distributed verification infrastructures. By advancing these areas, the authors envision that formal methods will become an indispensable part of building reliable, scalable, and safe multi‑agent robotic systems.
Comments & Academic Discussion
Loading comments...
Leave a Comment