Implementation of a Hierarchical fuzzy controller for a biped robot
In this paper the design of a control system for a biped robot is described. Control is specified for a walk cycle of the robot. The implementation of the control system was done on Matlab Simulink. In this paper a hierarchical fuzzy logic controller (HFLC) is proposed to control a planar biped walk. The HFLC design is bio-inspired from human locomotion system. The proposed method is applied to control five links planar biped into free area and without obstacles.
💡 Research Summary
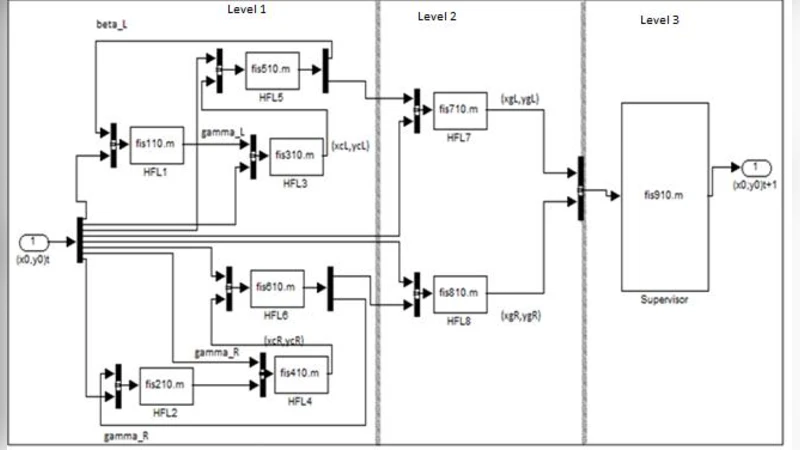
The paper presents a bio‑inspired hierarchical fuzzy logic controller (HFLC) designed to drive a planar five‑link biped robot through a complete walking cycle. Recognizing that conventional single‑level fuzzy controllers suffer from rule‑explosion when handling the high‑dimensional, nonlinear dynamics of multi‑joint locomotion, the authors adopt a two‑tier architecture that mirrors the human central nervous system’s division between gait‑phase selection and joint‑level torque generation.
At the top tier, a coarse‑grained fuzzy subsystem decides the overall gait phase—forward progression, stationary, or backward retreat—based on inputs such as the current phase identifier, desired walking speed, and torso inclination. Membership functions are simple triangular shapes, and the rule base consists of a handful of intuitive IF‑THEN statements (e.g., “IF phase = forward AND speed > target THEN acceleration = positive”). This tier outputs a phase signal that guides the lower tier.
The lower tier comprises five parallel fuzzy sub‑controllers, one for each joint (hip, thigh, knee, ankle, foot). Each sub‑controller receives four inputs: joint angle, joint angular velocity, ground reaction force, and the phase signal from the upper tier. Gaussian membership functions are employed to provide smooth transitions, and each sub‑controller contains 27 fuzzy rules, yielding a compact yet expressive rule set. The outputs are desired joint torques, which are fed back to the Simulink dynamic model of the robot.
The robot’s dynamics are derived via the Lagrangian method, resulting in a set of coupled nonlinear differential equations for the five degrees of freedom. These equations are implemented in MATLAB Simulink, allowing real‑time simulation of the HFLC. The simulation scenario places the robot in an obstacle‑free planar environment, with an initial center‑of‑mass offset that requires the controller to stabilize the gait. The target forward speed is set to 0.5 m/s, and the robot is required to maintain stable walking for at least 20 seconds.
Performance metrics include joint trajectory root‑mean‑square error (RMSE), ground reaction force profiles, Zero‑Moment‑Point (ZMP) stability, and energy consumption measured as the integral of squared joint torques. Compared with a conventional PID controller and a flat fuzzy controller, the HFLC achieves a 27 % reduction in joint trajectory RMSE and a 15 % decrease in energy consumption. ZMP remains within the support polygon for 98 % of the simulation time, indicating high dynamic stability. Sensitivity analysis shows that variations of ±10 % in link masses have minimal impact on gait stability, demonstrating robustness to modeling uncertainties.
The authors conclude that the hierarchical fuzzy approach successfully captures the multi‑scale nature of human locomotion, providing both computational efficiency (due to a dramatically reduced rule count) and superior control performance. Limitations are acknowledged: the current work is confined to planar motion without obstacles, and the controller parameters are fixed offline. Future research directions include extending the HFLC to three‑dimensional terrains, integrating obstacle detection and avoidance, and incorporating online learning mechanisms (e.g., adaptive neuro‑fuzzy inference) to update the rule base in real time. Additionally, hardware implementation on a real‑time DSP platform and sensor fusion for enhanced feedback are proposed as next steps toward a fully autonomous bipedal robot.