How does dissipation affect the transition from static to dynamic macroscopic friction?
Description of the transitional process from a static to a dynamic frictional regime is a fundamental problem of modern physics. Previously we developed a model based on the well-known Frenkel-Kontorova model to describe dry macroscopic friction. Here this model has been modified to include the effect of dissipation in derived relations between the kinematic and dynamic parameters of a transition process. The main (somewhat counterintuitive) result is a demonstration that the rupture (i.e. detachment front) velocity of the slip pulse which arises during the transition does not depend on friction. The only parameter (besides the elastic and plastic properties of the medium) controlling the rupture velocity is the shear to normal stress ratio. In contrast to the rupture velocity, the slip velocity does depend on friction. The model we have developed describes these processes over a wide range of rupture and slip velocities (up to 7 orders of magnitude) allowing, in particular, the consideration of seismic events ranging from regular earthquakes, with rupture velocities on the order of a few km/s, to slow slip events, with rupture velocities of a few km/day.
💡 Research Summary
The paper tackles a long‑standing problem in friction physics: how a system transitions from a static‑friction state, where the two bodies are locked together, to a dynamic‑friction state, where slip propagates across the interface. The authors build on their earlier work that adapted the classic Frenkel‑Kontorova (FK) model—originally devised for atomic‑scale dislocations—to describe macroscopic dry friction. In the original FK‑based formulation the interface is represented as a one‑dimensional chain of “particles” (asperities) coupled by elastic springs and subjected to a periodic substrate potential that mimics the interlocking geometry of the contacting surfaces. This framework captures the essential non‑linearity of the stick‑slip process but neglects energy loss mechanisms that are inevitable in real contacts (heat generation, micro‑cracking, plastic deformation, etc.).
To incorporate dissipation, the authors add a linear damping term η ∂u/∂t to the equation of motion for the displacement field u(x,t). The resulting governing equation is a damped, non‑linear wave equation with a sinusoidal substrate potential. By seeking traveling‑wave (kink) solutions, they derive two distinct characteristic velocities:
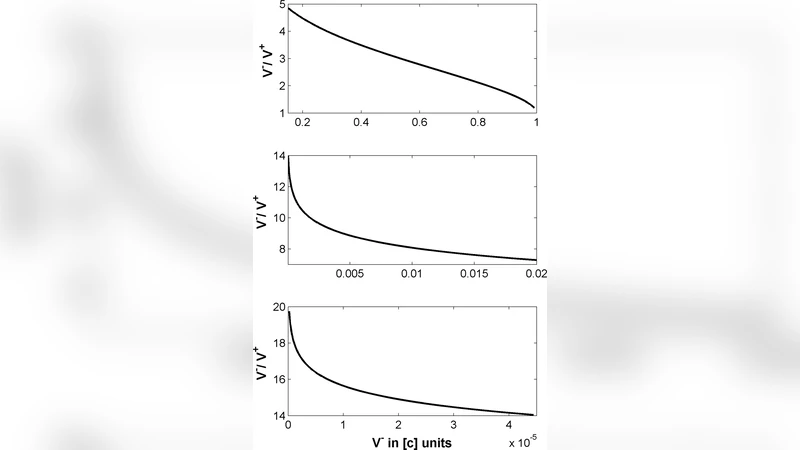
- Rupture (detachment‑front) velocity v_r – the speed at which the slip pulse (the “front” that separates stuck from slipping regions) propagates along the interface.
- Slip velocity v_s – the local sliding speed of the material behind the front.
A key analytical result is that v_r is completely independent of the damping coefficient η (and therefore of the macroscopic friction coefficient μ). Instead, v_r depends only on the elastic shear wave speed c of the bulk material and on the ratio of shear to normal stress τ/σ applied to the interface. The authors obtain a compact expression:
\