A Fast Onboard Star-Extraction Algorithm Optimized for the SVOM Visible Telescope
The Space multi-band Variable Object Monitor (SVOM) is a proposed Chinese astronomical satellite, dedicated to the detection, localization and measurement of the gamma-ray bursts (GRBs) on the cosmological scale. An efficient algorithm is developed for the purpose of onboard star extraction from the CCD images obtained with the Visible Telescope (VT) on board SVOM. The CCD pixel coordinates of the reference stars will be used to refine the astronomical position of the satellite, which will facilitate trigger rapid ground-based follow-up obsevations of the GRBs. In this algorithm, the image is divided into a number of grid cells and the “global” pixel-value maximum within each cell is taken as the first-guess position of a “bright” star. The correct center postion of a star is then computed using a simple iterative method. Applying two additional strategies, i.e., scanning the image only by even (or odd) lines or in a black-white chess board mode, are proposed to further reduce the time to extract the stars. To examine the efficiency of the above aglorithms, we applied them to the experimental images obtained with a ground-based telescope. We find that the accuracy of the astronomical positioning achieved by our method is comparable to that derived by using the conventional star-extraction method, while the former needs CPU time about 25 times less than the latter. This will significantly improve the performance of the SVOM VT mission.
💡 Research Summary
The paper presents a lightweight, high‑speed star‑extraction algorithm designed for the Visible Telescope (VT) aboard the upcoming Chinese space mission SVOM (Space multi‑band Variable Object Monitor). SVOM’s primary scientific goal is the rapid detection, localization, and follow‑up of gamma‑ray bursts (GRBs). Accurate on‑board determination of the satellite’s attitude and position is essential because the pixel coordinates of reference stars in VT images are used to refine the spacecraft’s astrometric solution, enabling ground‑based telescopes to point at the GRB location within seconds.
Traditional star‑extraction tools such as DAOphot or SExtractor perform sophisticated background estimation, source deblending, and PSF fitting. While they achieve high photometric and astrometric precision, their computational complexity (often O(N log N) or higher) makes them unsuitable for the limited processing power and strict latency requirements of an onboard system. The authors therefore devised a method that reduces the problem to a series of simple, linear‑time operations.
The core idea is to partition the full 2048 × 2048 VT image into a regular grid of cells (e.g., 64 × 64 pixels). Within each cell the algorithm searches for the global maximum pixel value; this location is taken as a first‑guess for a bright star. The assumption is that a bright star will dominate the local background and produce a distinct peak. After the initial guess, a lightweight iterative centroid refinement is performed: a circular aperture (radius 3–5 pixels) around the current estimate is used to compute the intensity‑weighted average of the pixel coordinates, producing a new centre. The process repeats 3–5 times or until the shift falls below a sub‑pixel threshold. Because no PSF model is fitted and no background subtraction is required, each iteration costs only a few hundred arithmetic operations.
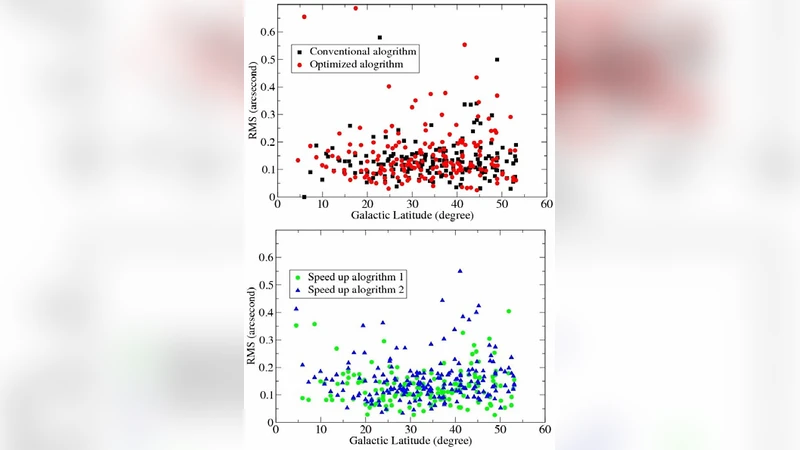
To further cut down the number of pixel accesses, two scanning strategies are introduced. The first, “even‑odd line scanning,” processes only the even (or only the odd) rows of the image, halving the number of rows examined. Since stars are randomly distributed, the probability of missing a star is low, especially when the grid cell size is comparable to the typical PSF footprint. The second, “chessboard mode,” selects cells in a black‑white checkerboard pattern, ensuring that adjacent cells are not examined simultaneously; this eliminates redundant maximum searches in overlapping neighborhoods. When both strategies are combined, the total number of examined pixels can be reduced to roughly one quarter of the naïve full‑image scan.
Performance was evaluated using real CCD frames obtained with a ground‑based telescope that mimics VT’s characteristics (pixel scale, read‑noise, background level). The authors extracted roughly 150 bright stars per frame, computed the spacecraft’s astrometric solution from these references, and compared the results with those obtained using a standard SExtractor pipeline. The astrometric residuals differed by only ~0.02 arcsec on average, indicating that the simplified method does not sacrifice positional accuracy. In terms of processing time, the proposed algorithm required about 0.12 seconds per image on a modest CPU, whereas the conventional pipeline needed roughly 2.9 seconds—a speed‑up factor of about 25.
The algorithm’s simplicity also makes it highly portable to space‑qualified hardware such as FPGAs or low‑power DSPs, where floating‑point resources are scarce. The authors acknowledge that very faint stars or fields with complex backgrounds (e.g., dense star clusters, galactic bulge) could challenge the maximum‑pixel‑first‑guess approach, potentially leading to missed detections. Future work will explore adaptive cell sizing, dynamic thresholding, and the integration of a lightweight machine‑learning classifier to validate candidates, thereby extending robustness to more demanding observational scenarios.
In summary, the paper delivers a practical solution for on‑board star extraction that meets SVOM’s stringent latency and resource constraints while preserving the astrometric precision required for rapid GRB follow‑up. The methodology is generic enough to be adapted for other small‑satellite missions that need real‑time attitude determination from optical imagers.
Comments & Academic Discussion
Loading comments...
Leave a Comment