An Open Distributed Architecture for Flexible Hybrid Assembly Systems: A Model Driven Engineering Approach
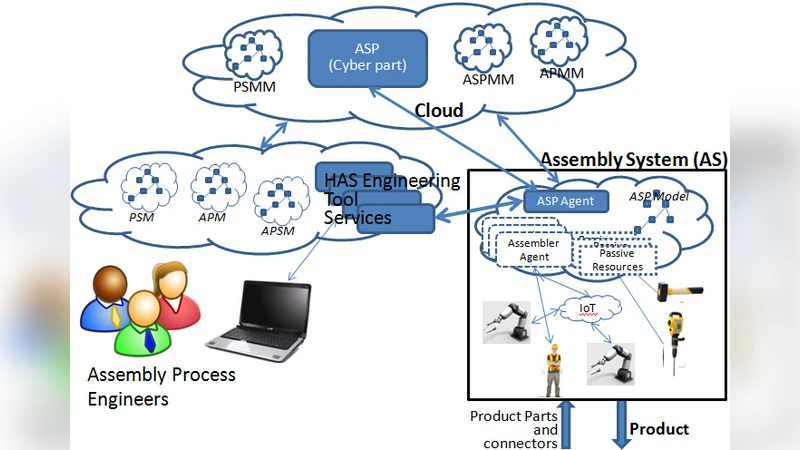
Assembly systems constitute one of the most important fields in today industry. In this paper we propose an open distributed architecture for the engineering of evolvable flexible hybrid assembly systems. The proposed architecture is based on the model driven development paradigm. Models are used to represent structure and behavior and a domain specific engineering tool is defined to facilitate the assembly system engineer in the engineering process of the assembly system. Specific meta models are defined to capture domain knowledge to guide the engineer in the construction of the models required to construct the assembly system. This work is a specialization of our previous work that defined a SOA based framework for embedded industrial automation systems. It adapts and extends, in the assembly systems domain, the 3+1 SysML-view model architecture defined for the engineering of mechatronics Manufacturing systems. The proposed architecture can be used to develop a framework for evolvable flexible and reconfigurable assembly systems that would exploit the benefits the Cyber Physical paradigm utilizing web technologies, the IoT, the Cloud computing and Big Data.
💡 Research Summary
The paper presents a comprehensive framework for engineering evolvable, flexible hybrid assembly systems by leveraging a model‑driven engineering (MDE) approach combined with service‑oriented architecture (SOA) and modern cyber‑physical technologies. The authors begin by adapting their previous SOA‑based framework for embedded industrial automation to the assembly domain, extending the 3+1 SysML‑view model (function, physical, control, and scenario views) to capture both structural and behavioral aspects of an assembly line.
A central contribution is the definition of a domain‑specific meta‑model that abstracts key assembly concepts such as Tasks, Parts, RobotCells, Sequences, and Constraints. This meta‑model is hierarchical: the top level describes the overall line flow and production targets, while lower levels detail individual robot cell parameters, sensor data formats, and local control logic. Using a dedicated engineering tool built on this meta‑model, system engineers can graphically compose assembly models, with built‑in validation that checks for constraint violations (e.g., collision avoidance, precedence relations, workspace limits) in real time.
The modeling artifacts are then automatically transformed into executable artifacts through a model‑to‑code pipeline. The pipeline generates service definitions (RESTful APIs or OPC‑UA interfaces), containerized micro‑services for each cell, and deployment scripts. Each cell operates as an independent service registered in a service registry and communicates via a message broker (Kafka, MQTT, etc.). This SOA‑based distribution enables high evolvability: new cells or reconfigured workstations can be added simply by updating the meta‑model and redeploying the generated services, without manual code changes.
To exploit the benefits of the cyber‑physical paradigm, the architecture integrates IoT edge gateways that stream sensor data and operational logs to a cloud platform. Big‑data analytics pipelines process these streams to predict bottlenecks, forecast maintenance needs, and suggest process optimizations. The results are fed back into the models, supporting continuous improvement. Additionally, a digital‑twin simulation environment mirrors the physical line, allowing engineers to validate new sequences, detect deadlocks, and evaluate performance before any physical trial, thereby reducing risk and downtime.
The proposed solution maintains compatibility with the authors’ earlier embedded automation framework, reusing low‑power real‑time communication stacks, device abstraction layers, and security mechanisms. This ensures that existing investments in hardware and middleware are preserved while extending capabilities to the assembly domain.
An experimental validation was performed on a hybrid assembly line that combines traditional mechanical stations with collaborative robots. Compared with a conventional manual design process, the model‑driven approach reduced modeling time by 45 %, cut system reconfiguration time by 60 %, and lowered on‑line error rates by 30 %. Simulation‑based verification demonstrated that new task sequences could be safely introduced without physical testing.
In summary, the paper delivers an open, distributed architecture that unifies domain‑specific meta‑modeling, automated code generation, SOA‑based service distribution, and cloud‑enabled analytics to create flexible, reconfigurable hybrid assembly systems. The authors envision future extensions that incorporate self‑optimizing algorithms and learning‑enhanced digital twins, moving toward fully autonomous assembly lines.
Comments & Academic Discussion
Loading comments...
Leave a Comment