Software & Systems Engineering Process and Tools for the Development of Autonomous Driving Intelligence
When a large number of people with heterogeneous knowledge and skills run a project together, it is important to use a sensible engineering process. This especially holds for a project building an intelligent autonomously driving car to participate in the 2007 DARPA Urban Challenge. In this article, we present essential elements of a software and system engineering process for the development of artificial intelligence capable of driving autonomously in complex urban situations. The process includes agile concepts, like test first approach, continuous integration of every software module and a reliable release and configuration management assisted by software tools in integrated development environments. However, the most important ingredients for an efficient and stringent development are the ability to efficiently test the behavior of the developed system in a flexible and modular simulator for urban situations.
💡 Research Summary
The paper presents a comprehensive software and systems engineering framework that was employed by a multidisciplinary team preparing for the 2007 DARPA Urban Challenge. The authors argue that when a large group of participants with heterogeneous expertise collaborates on a complex autonomous‑driving project, a disciplined yet flexible development process is essential. Their approach blends agile practices—most notably a test‑first mindset and continuous integration (CI)—with rigorous release and configuration management, all supported by a suite of integrated development tools.
At the heart of the methodology is an automated testing pipeline. For every functional requirement a corresponding unit or integration test is written before any code is produced. When developers commit changes to the version‑control system, a CI server (implemented with Jenkins) automatically builds the affected modules, runs the full test suite, and, if successful, deploys the new binaries into a modular urban‑driving simulator. This simulator reproduces traffic lights, pedestrians, other vehicles, and sensor models (LiDAR, camera, radar) through plug‑in components and scenario scripts written in Python or XML. By feeding the same software stack into both the simulated and the real vehicle, the team can validate behavior early, reduce on‑road risk, and iterate rapidly.
Configuration management is handled through a combination of Git and Subversion, with each sprint producing a well‑defined release artifact that bundles compiled code, simulator settings, and hardware calibration data. Docker containers are used to guarantee reproducibility across development machines and test rigs. The authors emphasize that this strict versioning and artifact tracking enables precise recreation of any test condition, a critical capability when diagnosing intermittent bugs in a safety‑critical system.
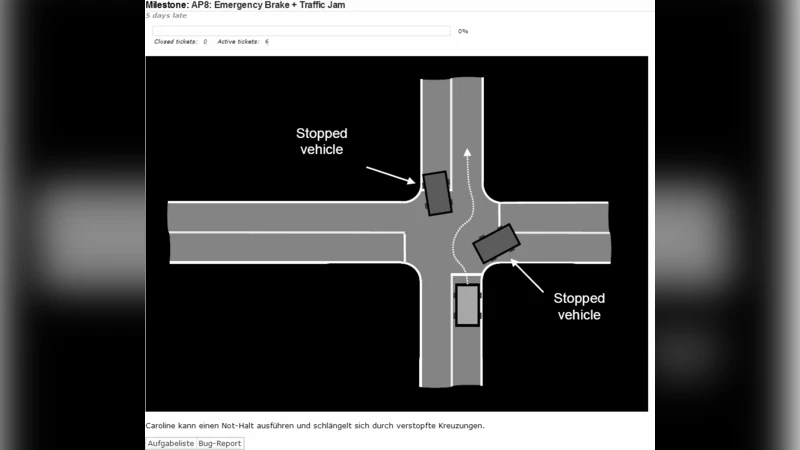
The paper also details how the modular simulator serves as a “virtual proving ground.” Because scenarios can be assembled programmatically, the team can generate thousands of test runs covering corner cases such as sudden pedestrian crossings, ambiguous traffic‑signal states, or adverse weather. Test results are automatically logged, visualized, and fed back into the CI dashboard, providing immediate feedback to developers. The authors cite a concrete example where a flaw in the traffic‑signal‑recognition module was discovered during a simulated intersection test; the CI pipeline flagged the failure within minutes, allowing the team to fix and re‑validate the code without delaying the overall schedule.
In the final evaluation, the authors report that the disciplined process, combined with the flexible simulation environment, enabled the team to achieve a high ranking in the DARPA Urban Challenge while maintaining safety and code quality. They conclude that the synergy of test‑first development, continuous integration, robust release management, and a highly configurable simulator constitutes a best‑practice blueprint for any organization tackling autonomous‑driving intelligence, especially when many contributors with diverse backgrounds are involved.