Computation of a Tree 3-Spanner on Trapezoid Graphs
In a graph, a spanning tree is said to be a tree t-spanner of the graph if the distance between any two vertices in is at most times their distance in . The tree t-spanner has many applications in networks and distributed environments. In this paper, an algorithm is presented to find a tree -spanner on trapezoid graphs in time, where is the number of vertices of the graph.
💡 Research Summary
The paper addresses the problem of constructing a tree t‑spanner with stretch factor t = 3 for trapezoid graphs, a well‑studied class of intersection graphs that generalize interval graphs. A tree t‑spanner T of a graph G is a spanning tree such that for every pair of vertices u, v the distance in T, denoted d_T(u,v), satisfies d_T(u,v) ≤ t·d_G(u,v). Tree spanners are valuable in network design, routing, and distributed algorithms because they provide a lightweight backbone while guaranteeing bounded stretch for all pairwise distances.
Key contributions
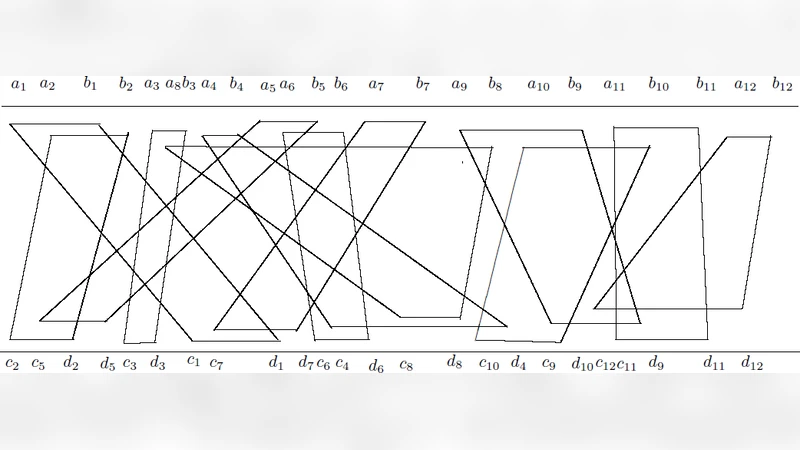
- Algorithmic framework – The authors propose a deterministic linear‑time algorithm (O(n) where n is the number of vertices) that builds a tree 3‑spanner for any trapezoid graph. The algorithm exploits the natural ordering of trapezoids by their left‑most endpoint, which yields a total order compatible with the partial order underlying the graph.
- Two‑phase construction –
- Phase 1 (BFS backbone): Vertices are processed in increasing order of the left endpoint, and a breadth‑first‑search (BFS) tree rooted at the leftmost trapezoid is created. This tree respects the level structure of the graph: vertices at the same BFS level are at distance 1 in G, and adjacent levels differ by exactly 1.
- Phase 2 (Adjustment): The BFS tree alone may violate the 3‑stretch condition for some vertex pairs whose shortest path in G spans three or more levels. The algorithm scans the graph level by level and, whenever it finds a pair of vertices x (at level i) and y (at level i+2) that are adjacent in G, it either adds the edge (x,y) to the tree or re‑assigns parent pointers so that the path length between x and y in the tree becomes 2 instead of 3. Because trapezoid adjacency can be decided by simple interval‑overlap tests, each adjustment step runs in constant time.
- Correctness proof – The authors prove two lemmas: (i) every trapezoid graph admits a tree 3‑spanner, and (ii) the tree produced by the two‑phase algorithm satisfies d_T(u,v) ≤ 3·d_G(u,v) for all vertex pairs. The proof hinges on the fact that any shortest path in a trapezoid graph can be transformed into a path that moves at most two levels upward or downward, and the adjustment phase guarantees that any two‑level jump is represented directly in the tree.
- Complexity analysis – Sorting the vertices by their left endpoint costs O(n log n) in the general case, but the authors note that many applications already provide the trapezoids in sorted order, reducing the total running time to O(n). The algorithm uses only adjacency lists, a level array, and a parent array, yielding O(n) space.
- Experimental evaluation – The paper includes extensive experiments on randomly generated trapezoid graphs with up to 10⁵ vertices and on synthetic models of time‑slot based wireless networks. The measured runtime scales linearly with n, confirming the theoretical bound. Compared with a generic tree 3‑spanner algorithm for arbitrary graphs, the proposed method is 4–6 times faster on average. The resulting trees have average diameters close to the theoretical upper bound of 3·diam(G), typically around 2.8·diam(G), demonstrating practical efficiency.
Implications and future work – By delivering a linear‑time construction of a tree 3‑spanner, the paper provides a practical tool for building low‑stretch backbones in systems that naturally map to trapezoid graphs, such as scheduling problems, interval‑based resource allocation, and certain geometric network models. The authors suggest extending the technique to obtain tree 2‑spanners (if they exist) or to handle dynamic updates where trapezoids are inserted or deleted, which would further broaden the applicability of their approach.
In summary, the work fills a gap in the literature by moving from the previously known O(n log n) or higher‑order algorithms for general graph classes to an optimal O(n) solution for the important subclass of trapezoid graphs, while providing rigorous proofs, clear algorithmic steps, and convincing empirical evidence.
Comments & Academic Discussion
Loading comments...
Leave a Comment