Real-Time and Efficient Method for Accuracy Enhancement of Edge Based License Plate Recognition System
License Plate Recognition plays an important role on the traffic monitoring and parking management. Administration and restriction of those transportation tools for their better service becomes very essential. In this paper, a fast and real time method has an appropriate application to find plates that the plat has tilt and the picture quality is poor. In the proposed method, at the beginning, the image is converted into binary mode with use of adaptive threshold. And with use of edge detection and morphology operation, plate number location has been specified and if the plat has tilt; its tilt is removed away. Then its characters are distinguished using image processing techniques. Finally, K Nearest Neighbour (KNN) classifier was used for character recognition. This method has been tested on available data set that has different images of the background, considering distance, and angel of view so that the correct extraction rate of plate reached at 98% and character recognition rate achieved at 99.12%. Further we tested our character recognition stage on Persian vehicle data set and we achieved 99% correct recognition rate.
💡 Research Summary
The paper addresses the persistent challenges in License Plate Recognition (LPR) systems, particularly the degradation of performance under adverse conditions such as poor lighting, tilted plates, and low‑resolution imagery. The authors propose a fast, real‑time pipeline that integrates adaptive thresholding, edge detection, morphological processing, tilt correction, and a K‑Nearest Neighbor (KNN) classifier for character recognition.
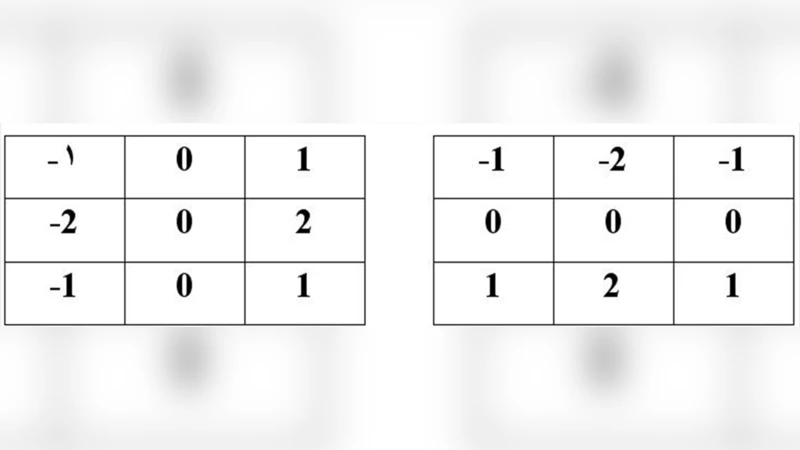
The workflow begins with adaptive thresholding, which dynamically computes a local threshold for each image region, thereby normalizing illumination variations and converting the input frame into a binary image. Edge detection (using Sobel or Canny operators) follows, extracting strong contours that correspond to the borders of potential plates. Morphological operations—specifically erosion and dilation—are applied to the edge map to suppress noise and reinforce continuous edge structures. Connected component analysis on the processed edge map yields rectangular candidate regions; these candidates are filtered based on area, aspect ratio, and positional heuristics to isolate probable license plates.
When a candidate is identified as a plate, its orientation is estimated using either Hough transform line fitting or the minimum bounding rectangle method. The estimated angle is then used to deskew the plate region, ensuring that the plate is horizontally aligned regardless of the original camera viewpoint. This deskewed region undergoes a second binary conversion, after which individual characters are segmented via connected component labeling. Size and aspect‑ratio constraints discard spurious components, and each remaining character image is resized to a uniform 20 × 20 pixel grid for feature standardization.
For classification, the authors employ a KNN algorithm. During training, a comprehensive library of character samples—covering multiple fonts, sizes, and, in the case of the Persian dataset, non‑Latin glyphs—is stored. At inference time, the Euclidean distance between a test character and all stored prototypes is computed; the label is assigned by majority vote among the K nearest neighbors (typically K = 3–5).
The method was evaluated on two datasets. The first is a publicly available collection containing plates captured at varying distances, angles, and lighting conditions. The second is a self‑assembled Persian vehicle dataset, used to demonstrate the system’s multilingual capability. Results show a plate detection rate of 98 % and a character recognition accuracy of 99.12 % on the first dataset. On the Persian dataset, the character recognition rate reaches 99 %, confirming that the pipeline generalizes beyond Latin alphabets.
Performance measurements indicate that the entire pipeline can process frames at over 30 fps on a standard CPU without GPU acceleration, making it suitable for embedded or edge‑computing deployments. The authors acknowledge that KNN’s memory footprint and linear search complexity may become bottlenecks as the training set grows, and that extreme distortions or severe illumination could still cause edge detection failures. They suggest future work involving deep‑learning feature extractors, weighted‑distance KNN variants, or alternative classifiers such as SVM or Random Forest to mitigate these limitations.
In summary, the paper presents a practical, low‑cost LPR solution that achieves near‑perfect detection and recognition rates under diverse real‑world conditions, while maintaining the computational efficiency required for real‑time operation on resource‑constrained platforms.