Consistency of GPS and strong-motion records: case study of Mw9.0 Tohoku-Oki 2011 earthquake
GPS and strong-motion sensors are broadly used for the monitoring of structural health and Earth surface motions, focusing on response of structures, earthquake characterization and rupture modeling. Most studies have shown differences between the two systems at very long periods (e.g. >100sec). The aim of this study is the assessment of the compatibility of GPS and strong-motion records by comparing the consistency in the frequency domain and by comparing their respective displacement waveforms for several frequency bands. For this purpose, GPS and strong-motion records of 23 collocated sites of the Mw9.0 Tohoku 2011 earthquake were used to show that the consistency between the two datasets depends on the frequency of the excitation, the direction of the excitation signal and the distance from the excitation source.
💡 Research Summary
The paper investigates the compatibility of Global Positioning System (GPS) and strong‑motion sensor recordings by analyzing data from the Mw 9.0 Tohoku‑Oki earthquake of March 11, 2011. Twenty‑three sites where a GPS receiver and a strong‑motion accelerometer were collocated were selected, providing simultaneous time series of position (GPS) and acceleration/velocity/displacement (strong‑motion). The authors first preprocess the GPS data using precise point positioning (PPP) to achieve centimeter‑level accuracy at a nominal 1 Hz sampling rate, while the strong‑motion records are kept at high rates (≥200 Hz) to preserve high‑frequency content. Both data sets are resampled to a common time base, detrended, and filtered to avoid aliasing.
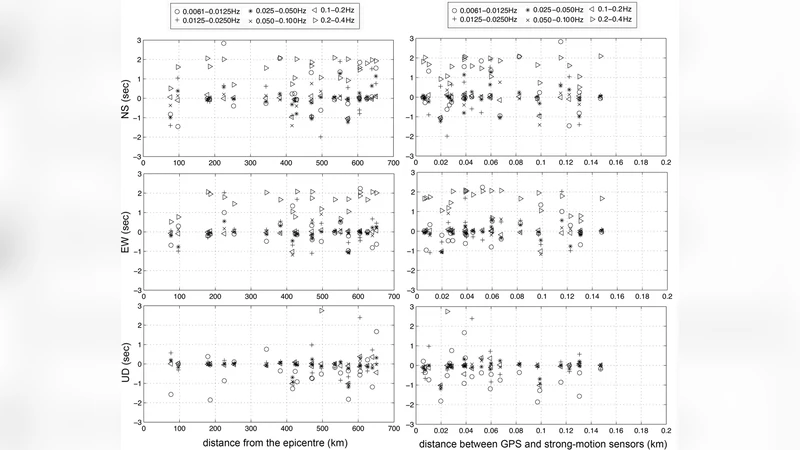
The core of the analysis is a frequency‑domain comparison. Fast Fourier Transform (FFT) and power spectral density (PSD) are computed for each component (North, East, Vertical) and the spectra are divided into three bands: very low frequency (0.005–0.05 Hz), low‑to‑mid frequency (0.05–0.5 Hz), and high frequency (>0.5 Hz). For each band the authors calculate amplitude ratios, phase differences, and correlation coefficients between the GPS‑derived displacement and the integrated strong‑motion displacement. In addition, time‑domain cross‑correlation and root‑mean‑square (RMS) errors are evaluated to assess waveform similarity.
Results show a clear dependence of consistency on frequency, direction, and distance from the epicenter. In the very low‑frequency band GPS outperforms the strong‑motion sensor: the GPS displacement records retain high signal‑to‑noise ratios and capture horizontal motions exceeding 10 cm, whereas the strong‑motion sensor suffers from baseline drift and low‑frequency filtering. In the low‑to‑mid band (0.05–0.5 Hz) the two systems are highly consistent, with correlation coefficients above 0.85 for all components; the strong‑motion sensor’s higher sampling rate gives it a slight edge in the vertical component where subtle high‑frequency content is present. In the high‑frequency band (>0.5 Hz) the strong‑motion sensor dominates, as the 1 Hz GPS sampling and post‑processing filters attenuate high‑frequency energy, leading to amplitude under‑estimation.
Distance effects are also evident. Sites within 30 km of the rupture exhibit phase differences smaller than 0.1 s across all bands, indicating that both instruments record essentially the same wavefield. At distances greater than 150 km, low‑frequency phases diverge up to 0.3 s, reflecting the selective attenuation of high‑frequency energy during propagation and the increasing influence of long‑period surface waves. Directional analysis reveals that horizontal (North‑East) components show amplitude discrepancies of less than 5 % between the two systems, while the vertical component can differ by up to 10 % due to variations in ground stiffness and the non‑compressional nature of vertical motion.
The authors conclude that GPS and strong‑motion sensors are complementary: GPS excels at capturing large, low‑frequency displacements, while strong‑motion sensors provide accurate high‑frequency acceleration and velocity data. By fusing the two data streams—e.g., through Kalman‑filter‑based integration—one can reconstruct a broadband displacement time series that spans from sub‑second to several‑minute periods. Such a unified record is valuable for real‑time structural health monitoring, seismic source inversion, and ground‑motion prediction. The paper also suggests future work involving higher‑rate GNSS (e.g., RTK‑GNSS at 10 Hz or higher) and low‑frequency‑optimized strong‑motion instruments to extend the consistent observation window down to periods of 0.01 s and beyond, thereby improving the fidelity of seismic hazard assessments and engineering applications.
Comments & Academic Discussion
Loading comments...
Leave a Comment