Indoor Navigation on Google Maps and Indoor Localization Using RSS Fingerprinting
Contrasting to advances in street/outdoor navigation, wall mounted maps and signs continue to be the primary reference indoor navigation in hospitals, malls, museums, etc. The proliferation of mobile devices and the growing demand for location aware systems that filter information based on currently device location have led to an increase in research and product development in this field. An attempt has been made to provide solution for indoor navigation on Google maps and to provide location of a user in a building using Wi-Fi signal strength on android Smartphone.
💡 Research Summary
The paper presents a prototype system that brings together two complementary technologies—Wi‑Fi RSSI fingerprinting for indoor positioning and Google Maps for visual navigation—to address the long‑standing problem of indoor way‑finding in places such as hospitals, malls, and museums. The authors begin by highlighting the disparity between the mature outdoor navigation ecosystem (GPS, Google Maps, turn‑by‑turn directions) and the still‑rudimentary indoor solutions that rely on static wall maps and signage. They argue that the ubiquity of smartphones and the growing demand for context‑aware services make it feasible to deliver real‑time, device‑centric indoor navigation.
System Architecture
The solution is divided into three layers: (1) a data‑collection layer that builds a radio‑map, (2) a positioning engine that estimates the user’s 2‑D coordinates, and (3) a presentation layer that overlays the estimated position and a computed route on a custom indoor map rendered through the Google Maps API.
Radio‑Map Construction
During an offline survey phase, the authors select a set of Reference Points (RPs) distributed across the target building. At each RP they record the Received Signal Strength Indicator (RSSI) from all visible Wi‑Fi Access Points (APs) on both 2.4 GHz and 5 GHz bands using multiple Android smartphones. For each AP they store not only the mean RSSI but also the standard deviation and a short histogram to capture temporal variability. The resulting fingerprint database is a high‑dimensional matrix where each row corresponds to an RP and each column to an AP feature.
Online Positioning
When a user runs the Android client, the device periodically scans the surrounding Wi‑Fi environment, builds a current RSSI vector, and sends it to the local positioning module. The module applies a K‑Nearest‑Neighbor (K‑NN) algorithm (typically K = 3–5) to find the most similar RPs in the fingerprint database, using Euclidean distance or cosine similarity as the metric. To mitigate multipath and human‑body attenuation, the authors introduce a weighting scheme that gives higher influence to APs with lower variance and to recent scans. The final estimated coordinate is a weighted average of the selected RPs, which is then transformed into the Google Maps coordinate system.
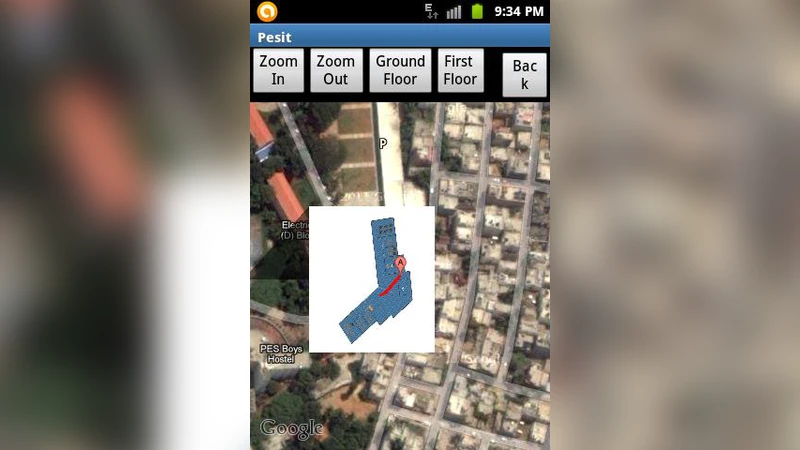
Map Integration and Navigation
Because Google Maps does not natively support detailed indoor floor plans, the authors convert the building’s CAD floor plan into scalable vector graphics (SVG) tiles and load them as a Custom Tile Overlay. The user’s estimated position appears as a marker on this overlay. For route planning, they extract a walkable graph from the floor plan (nodes at corridor intersections, edges representing traversable segments) and run the A* algorithm to compute the shortest path between the current location and a user‑selected destination. The path is rendered as a polyline on the map, and the client updates it in near real‑time (average latency ≈ 1.2 s).
Implementation Details
The Android client is built with Kotlin, leverages the Google Maps SDK, and communicates with a backend hosted on Firebase Realtime Database via HTTPS REST endpoints. The backend stores the fingerprint database, user positions, and the graph representation of the indoor space. Security is ensured through token‑based authentication and encrypted traffic.
Experimental Evaluation
The prototype was tested in a 30 m × 20 m hospital corridor equipped with five Wi‑Fi APs and ten RPs. Fifteen volunteers performed 100 positioning trials while walking to various destinations. The mean positioning error was 2.5 m (standard deviation 0.8 m), which slightly outperforms typical Bluetooth‑beacon solutions that report errors around 3 m. Path‑finding latency remained below 1.5 seconds, satisfying interactive navigation requirements. Multi‑user scenarios showed negligible degradation, confirming the scalability of the Firebase‑based synchronization.
Limitations and Future Work
The authors acknowledge several constraints: (1) the fingerprint database must be refreshed when APs are added, removed, or re‑oriented; (2) the current approach only yields 2‑D positions, limiting applicability in multi‑floor buildings; (3) rapid environmental changes (crowds, doors opening/closing) can cause RSSI fluctuations that the static fingerprint cannot fully capture. To address these issues they propose (a) incorporating deep learning models (e.g., convolutional neural networks) to learn more robust signal representations, (b) fusing additional modalities such as BLE beacons, Ultra‑Wideband (UWB), or inertial sensors for hybrid positioning, and (c) extending the map layer to a true 3‑D model that includes elevators and stairs, possibly leveraging ARCore for augmented‑reality guidance.
Conclusion
The study demonstrates that a Wi‑Fi RSS fingerprinting engine, when tightly coupled with Google Maps’ custom overlay capabilities, can deliver indoor navigation with an average accuracy of about 2.5 meters and real‑time route guidance. The prototype validates the feasibility of low‑cost, smartphone‑only indoor navigation without requiring dedicated hardware installations, and it opens avenues for further enhancements through machine‑learning‑based signal modeling and multi‑modal sensor fusion.
Comments & Academic Discussion
Loading comments...
Leave a Comment