Approximation Schemes for Partitioning: Convex Decomposition and Surface Approximation
We revisit two NP-hard geometric partitioning problems - convex decomposition and surface approximation. Building on recent developments in geometric separators, we present quasi-polynomial time algorithms for these problems with improved approximation guarantees.
💡 Research Summary
The paper tackles two classic NP‑hard geometric optimization problems—minimum convex decomposition of polygons with holes and minimum‑triangle surface approximation of xy‑monotone surfaces—by designing quasi‑polynomial‑time approximation schemes (QPTAS). Both problems have long been studied with only modest approximation guarantees: a 4‑approximation for convex decomposition (via Chazelle, Hertel‑Mehlhorn) and logarithmic‑factor approximations for surface approximation (Agarwal‑Suri, etc.). The authors build on recent advances in geometric separators, especially the work of Adamaszek‑Wiese, Har‑Peled, and Mustafa et al., to obtain substantially stronger results.
Convex Decomposition QPTAS
Given a polygon P (possibly with holes), the goal is to insert a set of non‑crossing diagonals so that each resulting sub‑polygon is convex while minimizing the number of convex pieces. The authors first fix an optimal decomposition C = {C₁,…,C_K}. For each convex piece C_i they define a “representative segment” s_i joining its leftmost and rightmost points. A random sample R of these segments (size Θ(r log r)) is taken, and a trapezoidal decomposition of R is built by shooting vertical rays from each endpoint. This yields a planar graph with O(r log r) vertices and edges.
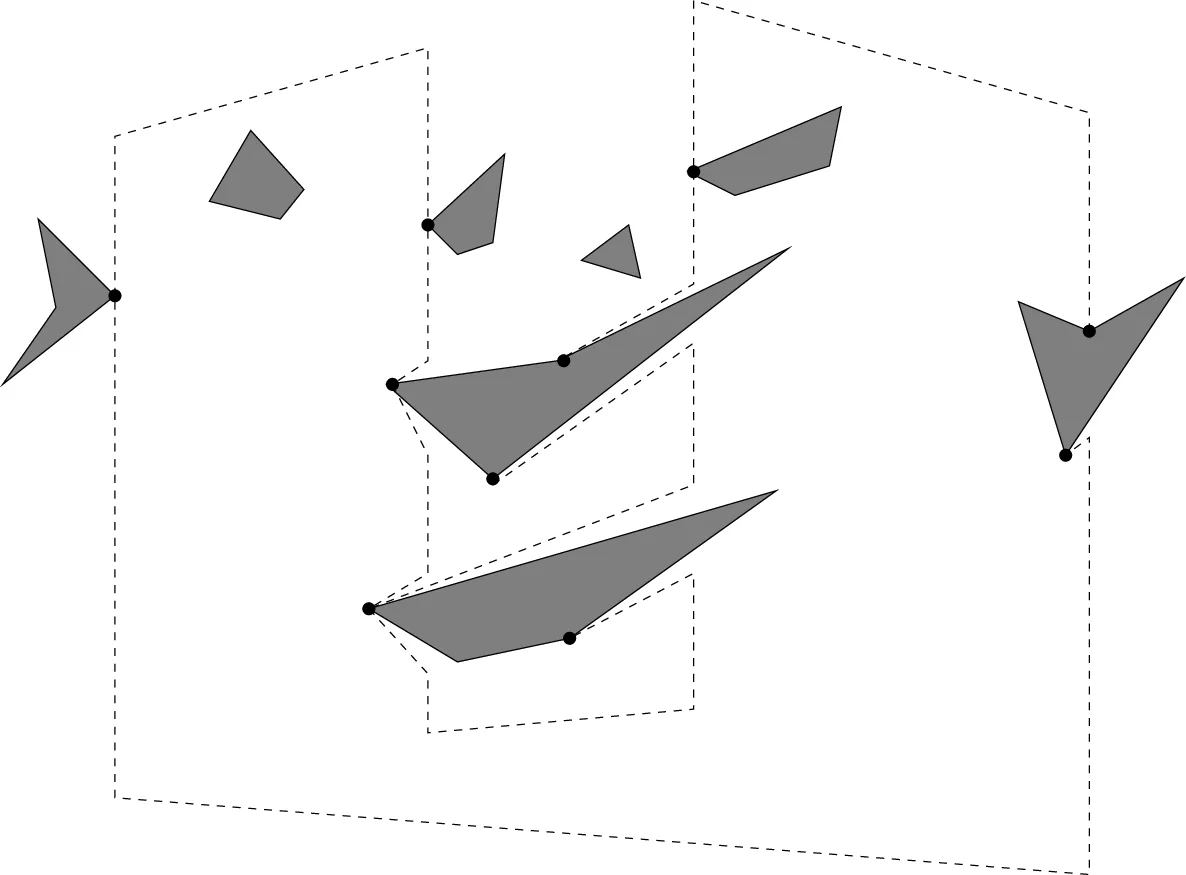
Using separator theorems for planar graphs, they locate a simple polygonal cycle Σ consisting of O(√r log r) edges of the trapezoidal graph such that the interior and exterior each contain at most 2K/3 convex pieces, and the total number of pieces intersected by Σ is at most δK (by choosing r = Θ(1/δ³)). Σ may intersect holes, so the authors prune Σ to Σ∩P, split it into fragments, and extend fragment endpoints to polygon vertices, thereby turning Σ into a conforming set D of diagonals. D contains O(1/δ²) diagonals, and the family of all possible D’s can be enumerated in n^{O(1/δ²)} time.
The crucial structural lemma shows that there exists a near‑optimal decomposition that respects D (i.e., none of its diagonals cross any diagonal in D). This is achieved by locally modifying the optimal decomposition: pieces intersected by D are re‑triangulated, incurring at most a δ‑fraction increase in the total number of pieces. Consequently, a recursive algorithm that guesses D, recurses on the sub‑polygons defined by D, and solves the base case (when the optimal size is small) by exhaustive search yields a (1+ε)‑approximation. The recursion depth is O(log K), and each level incurs a factor n^{O(1/ε²)} work, giving overall time n^{polylog n}.
Surface Approximation QPTAS
The second problem concerns approximating a bivariate function f(x, y) (sampled at n points S) by a piecewise‑linear function g such that |g(x_i, y_i) − z_i| ≤ μ for all sampled points, while minimizing the number of triangular facets. The authors reduce this to a planar disjoint set‑cover problem: they consider the family T of all triangles whose planar interpolation stays within μ of f over their interior. T enjoys a closure property—if a triangle is feasible, any smaller triangle inside it is also feasible. The task becomes selecting a maximum‑size subset of pairwise‑disjoint triangles from T that covers all points.
Applying the same separator framework to the planar graph induced by T, they find a cycle Σ that splits the optimal triangle set into two roughly equal halves while intersecting only a δ‑fraction of triangles. By converting Σ into a set of “separator triangles” (analogous to the diagonal set D) and recursing, they obtain a constant‑factor approximation: the final set of triangles has size O(1)·c where c is the size of an optimal solution. The algorithm runs in quasi‑polynomial time n^{polylog n}.
Contributions and Impact
- Introduces a novel diagonal‑separator construction for convex decomposition that works even when the separator passes through holes.
- Proves that a near‑optimal convex decomposition can be forced to respect any separator from a quasi‑polynomial‑size candidate family, enabling a QPTAS.
- Provides a clean reduction from surface approximation to a planar disjoint‑set‑cover problem with a useful closure property, and designs a QPTAS for this reduced problem.
- Improves approximation guarantees dramatically: from 4‑approximation to (1+ε) for convex decomposition, and from O(log c)‑approximation to a constant‑factor for surface approximation, both within quasi‑polynomial time.
Limitations
The algorithms are quasi‑polynomial rather than polynomial, so practical scalability may be limited; the parameter ε (or δ) directly controls the exponent in the running time. The surface approximation result assumes xy‑monotonicity of the underlying surface, leaving general 3‑D surfaces as an open direction. Moreover, the separator enumeration involves n^{O(1/ε²)} candidates, which could be large for small ε.
Future Directions
Potential research includes developing faster (perhaps polynomial‑time) PTAS for special subclasses, improving the constants in the separator construction, extending the surface approximation technique to non‑monotone or higher‑dimensional manifolds, and integrating heuristic pruning to make the QPTAS practical for large datasets.
In summary, the paper delivers the first quasi‑polynomial‑time approximation schemes for two fundamental geometric partitioning problems, achieving near‑optimal or constant‑factor guarantees by cleverly adapting planar separator theory to the structure of convex decompositions and surface approximations. This bridges a gap between theoretical approximation bounds and algorithmic feasibility, and opens avenues for further refinement and broader applicability.
Comments & Academic Discussion
Loading comments...
Leave a Comment