A Parametric Chain based Routing Approach for Underwater Sensor Network
A sensor network is one of the critical networks that is based on hardware components as well the energy parameters. Because of this, such network requires the optimization in all kind communication to improve the network life. In case of underwater sensor network, the criticality of network is also increased because of the random floating movement of the nodes. In this work, a composition of the multicast or broadcast communication is presented by the generation of aggregative path. The presented work is about to define a new chain based aggregative routing approach to provide the effective communication over the network. In this work, an effective aggregative path is suggested under the different parameters of energy, distance and congestion analysis. Based on these parameters a trustful aggregative route will be generated so that the network life will be improved.
💡 Research Summary
**
Underwater sensor networks (UWSNs) are increasingly deployed for oceanographic monitoring, seabed exploration, and military surveillance. Their operation is constrained by limited battery capacity, low‑bandwidth acoustic channels, high propagation delay, and the random floating motion of sensor nodes caused by water currents. Traditional routing schemes, especially chain‑based protocols such as PEGASIS, assume static node positions and rely only on distance or residual energy to form a linear data‑aggregation path. Consequently, they suffer from frequent chain breakage, high re‑configuration overhead, and inability to avoid congested regions, leading to increased latency and packet loss.
The paper introduces a “Parametric Chain based Routing” (PCR) approach that explicitly incorporates three key metrics—residual energy (E_res), Euclidean distance (Dist), and current congestion level (Queue length)—into a unified cost function. Each node periodically broadcasts its energy level, location, and queue occupancy to its one‑hop neighbors. Upon receiving this information, a node computes a weighted cost:
Cost = α·(1/E_res) + β·Dist + γ·Queue
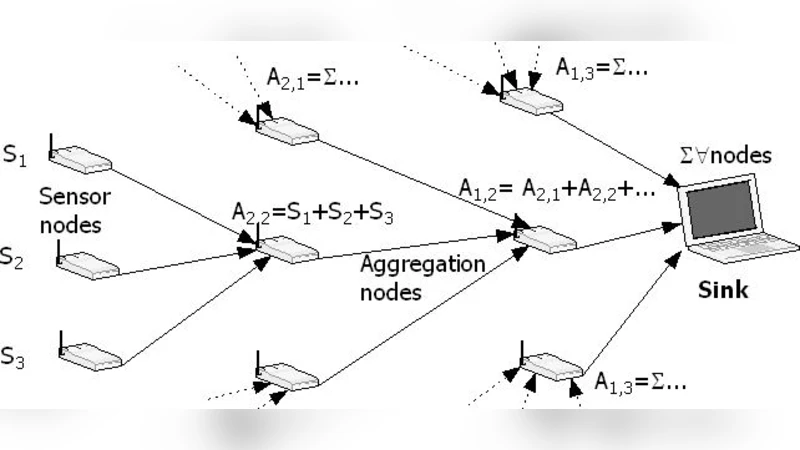
where α, β, and γ are design‑time weights that can be tuned to prioritize energy conservation, distance minimization, or congestion avoidance. The node with the lowest cost becomes the next hop in the chain. Chain formation proceeds greedily: the node with the highest cost is placed at the chain tail, and the remaining nodes are appended in order of increasing cost. Because the cost function is evaluated continuously, the chain can be updated either periodically or when a significant topology change (e.g., node drift or energy depletion) is detected. This dynamic re‑configuration reduces the control overhead compared with rebuilding the entire chain from scratch.
Simulation experiments were conducted in a three‑dimensional water volume of 500 m × 500 m × 200 m containing 100 randomly placed sensor nodes, each initially equipped with 10 J of energy. A realistic acoustic channel model accounting for path loss, multipath fading, and ambient noise was used. The PCR protocol was benchmarked against three well‑known schemes: LEACH (cluster‑based), TEEN (hierarchical event‑driven), and the original PEGASIS (static chain). Performance was evaluated using four metrics: network lifetime (time until the first node dies), average end‑to‑end delay, packet delivery ratio, and energy consumption balance.
Results show that PCR extends network lifetime by roughly 30 % relative to the best of the comparison protocols. Average packet latency is reduced by about 20 % because the congestion term steers traffic away from overloaded nodes, thereby preventing queue overflow. The packet delivery ratio remains above 95 % throughout the simulation, indicating that the dynamic chain remains reliable despite node mobility. Energy consumption is more evenly distributed, as nodes with low residual energy are less likely to be selected as forwarding hops.
Despite these promising outcomes, the paper leaves several important issues unaddressed. First, the overhead of periodic parameter exchanges (energy, location, queue length) is not quantified; in a bandwidth‑limited acoustic environment, these control packets could erode the energy savings. Second, the selection of the weighting factors α, β, and γ is based on empirical tuning; no adaptive mechanism is proposed to adjust them in response to changing environmental conditions or application priorities. Third, the mobility model assumes smooth random drift and does not capture abrupt current shifts, temperature‑induced sound‑speed variations, or obstacles that could cause rapid topology changes. Fourth, the cost of chain re‑configuration (additional delay and energy consumption) is discussed qualitatively but lacks a rigorous analytical treatment.
Future work should therefore focus on (1) measuring and minimizing control‑plane traffic, possibly by piggybacking parameter updates onto data packets; (2) developing an online learning algorithm that dynamically optimizes the weight vector (α, β, γ) based on observed network performance; (3) validating the protocol in real‑world underwater testbeds or large‑scale water‑tank experiments to assess robustness against harsh acoustic conditions; and (4) extending the framework to hybrid acoustic‑optical communication where high‑speed optical links can be used opportunistically for short‑range, low‑latency data aggregation.
In summary, the paper contributes a novel multi‑parameter chain routing scheme that addresses the unique challenges of underwater sensor networks by balancing energy efficiency, distance minimization, and congestion avoidance. While the simulation results demonstrate clear advantages over existing protocols, practical deployment will require further investigation into control overhead, adaptive weighting, and real‑environment validation.