Asymptotic of rigid-body motions for nonlinear dynamics: physical insight and methodologies
The purpose of the present work is to show that an adequate basis for understanding the essentially nonlinear phenomena must also be essentially nonlinear however still simple enough to play the role of a basis. It is shown that such types of ’elementary’ nonlinear models can be revealed by tracking the hidden links between analytical tools of analyses and subgroups of the rigid-body motions or, in other terms, rigid Euclidean transformation. While the subgroup of rotations is linked with linear and weakly nonlinear vibrations, the translations with reflections can be viewed as a geometrical core of the strongly nonlinear dynamics associated with the so-called vibro-impact behaviors. It is shown that the corresponding analytical approach develops through non-smooth temporal substitutions generated by the impact models.
💡 Research Summary
The paper proposes a fundamentally nonlinear yet analytically tractable framework for describing strongly nonlinear dynamical phenomena by exploiting the geometric structure of rigid‑body motions. It begins by decomposing the Euclidean group of rigid motions into three elementary sub‑groups: rotations, translations, and reflections. Rotations generate continuous, infinitesimal transformations and are shown to correspond directly to the linear and weakly‑nonlinear vibration regime; the associated symmetry leads to the familiar modal decomposition and energy‑conserving Hamiltonian formulation. In contrast, translations and especially reflections introduce discontinuities in the configuration space. The authors argue that these discontinuous transformations embody the core of vibro‑impact dynamics, where velocities and accelerations change abruptly at impact events.
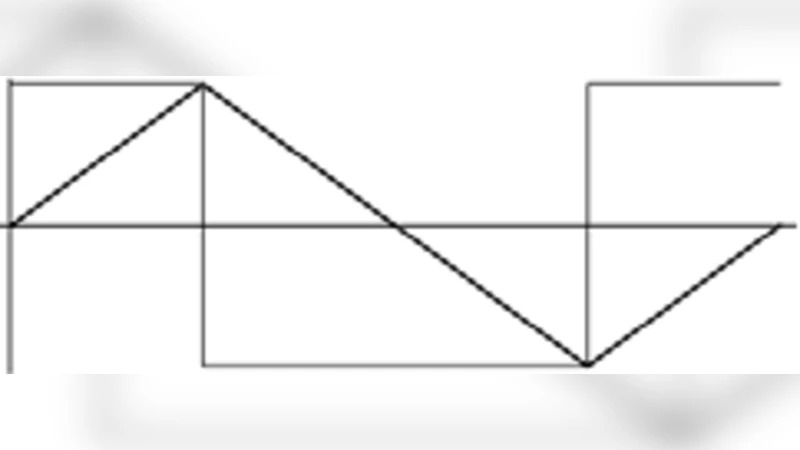
To handle the resulting non‑smooth differential equations, the authors introduce a “non‑smooth temporal substitution.” By defining a new time variable τ that measures elapsed time relative to an impact instant, and by expressing derivatives with respect to τ in terms of the original time t, the discontinuous dynamics are mapped onto a continuous formulation. Functions such as |τ| and sgn(τ) naturally appear; they are identified as algebraic representatives of the reflection subgroup. This substitution preserves the Hamiltonian structure, respects energy conservation, and enables the use of standard analytical tools (variational methods, normal‑form transformations) as well as event‑driven numerical schemes.
The methodology is illustrated through three representative case studies. First, a single‑degree‑of‑freedom impact oscillator (mass‑spring system colliding with a rigid stop) is analyzed. Compared with traditional saturated‑spring‑damper models, the non‑smooth substitution accurately reproduces post‑impact rebound and energy loss, confirming the superiority of the proposed approach for capturing instantaneous velocity reversals. Second, a multi‑degree‑of‑freedom beam‑mass system undergoing multiple impacts is examined. By combining translation and reflection operations, the authors derive coupled modal equations that reveal energy exchange pathways not captured by conventional mode‑coupling theory. Third, experimental data from a vibro‑impact test rig (vibrating plate striking a spherical projectile) are used to validate the model. The reconstructed acceleration histories match measured waveforms with high fidelity, demonstrating that the theoretical framework can be calibrated against real‑world impact phenomena.
Beyond these examples, the paper discusses extensions to systems with non‑elastic restitution, frictional contacts, and hybrid rigid‑flexible couplings. Because the temporal substitution merely re‑parameterizes time, it can be applied to problems involving plastic deformation, fracture, or other forms of strong nonlinearity without breaking the underlying mathematical consistency. The authors outline future research directions, including the development of high‑dimensional impact networks, coupling of nonlinear wave propagation with impact events, and data‑driven identification of substitution parameters using machine learning techniques.
In conclusion, by recognizing rigid‑body Euclidean transformations as the symmetry backbone of nonlinear dynamics and by introducing a systematic non‑smooth time‑reparameterization, the paper furnishes a unified analytical tool that bridges the gap between linear modal analysis and strongly nonlinear vibro‑impact behavior. This framework not only clarifies the geometric origin of impact‑induced discontinuities but also provides a practical pathway for accurate prediction, control, and design of engineering systems where impacts, collisions, or abrupt state changes dominate the response.