Distributed Vertex Cover Algorithms For Wireless Sensor Networks
Vertex covering has important applications for wireless sensor networks such as monitoring link failures, facility location, clustering, and data aggregation. In this study, we designed three algorithms for constructing vertex cover in wireless sensor networks. The first algorithm, which is an adaption of the Parnas & Ron’s algorithm, is a greedy approach that finds a vertex cover by using the degrees of the nodes. The second algorithm finds a vertex cover from graph matching where Hoepman’s weighted matching algorithm is used. The third algorithm firstly forms a breadth-first search tree and then constructs a vertex cover by selecting nodes with predefined levels from breadth-first tree. We show the operation of the designed algorithms, analyze them, and provide the simulation results in the TOSSIM environment. Finally we have implemented, compared and assessed all these approaches. The transmitted message count of the first algorithm is smallest among other algorithms where the third algorithm has turned out to be presenting the best results in vertex cover approximation ratio.
💡 Research Summary
The paper addresses the vertex‑cover problem in wireless sensor networks (WSNs), a fundamental sub‑task for many network‑level services such as link‑failure monitoring, facility placement, clustering, and data aggregation. Because WSN nodes have severe constraints on energy, bandwidth, and computational resources, the authors propose three fully distributed algorithms that can be executed locally without a central coordinator.
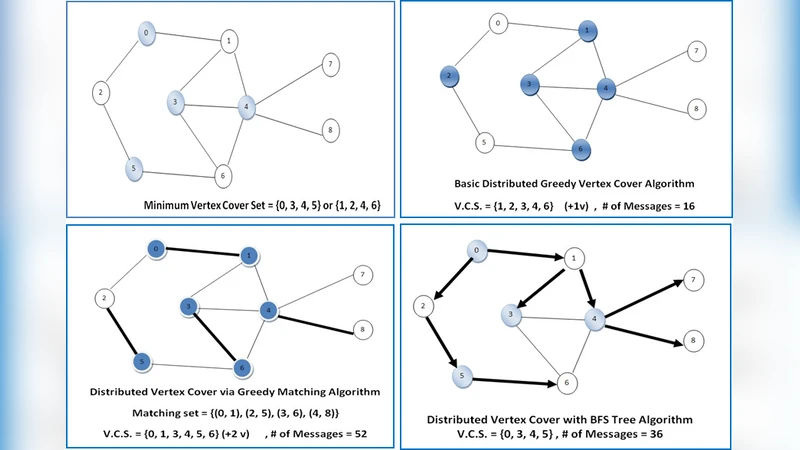
Algorithm 1 – Degree‑Based Greedy (adapted from Parnas & Ron).
Each node periodically broadcasts its current degree (the number of neighboring nodes). Nodes compare their degree with those of their neighbors; the node with the highest degree among a local group declares itself part of the vertex cover and marks all incident edges as covered. The process repeats until every edge is covered. This approach requires only degree information exchange, resulting in the smallest number of transmitted messages among the three methods, which translates into the lowest energy consumption. However, because the selection is purely local and greedy, the resulting cover can be up to 1.8 times the optimal size in the simulations.
Algorithm 2 – Matching‑Based Cover (using Hoepman’s weighted matching).
First, each edge is assigned a weight (e.g., based on link quality or node identifiers). Nodes locally execute Hoepman’s algorithm to compute a maximal weighted matching. For each matched edge, one of its two endpoints is added to the cover (the choice can be deterministic, such as the endpoint with the higher residual degree). This method captures more global structure than the greedy approach and achieves a cover size close to the theoretical 2‑approximation bound, with an observed approximation ratio around 1.5. The trade‑off is a higher communication overhead because matching requires additional negotiation messages among neighboring nodes.
Algorithm 3 – BFS‑Tree Level Selection.
A breadth‑first search (BFS) tree is first constructed from a designated root (either a random node or the node with the highest degree). Nodes receive a level number from the root. The algorithm then selects all nodes on even‑numbered levels (or alternatively odd levels) to form the vertex cover. Because every edge of the original graph connects nodes whose BFS levels differ by exactly one, at least one endpoint of each edge belongs to the selected set, guaranteeing a valid cover. This scheme yields the best approximation ratio observed in the experiments (≈ 1.3) while keeping the message count only modestly higher than the greedy method. The BFS construction is a one‑time broadcast/acknowledgment phase, after which level‑based selection is purely local.
Implementation and Evaluation.
All three algorithms were implemented as TinyOS components and evaluated in the TOSSIM simulator. The authors varied network size (50–200 nodes), density (average degree 3–6), and initial energy levels. For each scenario they measured: (1) total transmitted messages, (2) size of the resulting vertex cover (expressed as an approximation ratio to the optimal cover obtained offline), (3) execution time, and (4) overall energy consumption.
Key findings:
- The degree‑based greedy algorithm consistently generated the fewest messages, leading to the lowest energy drain, but its cover size was the largest among the three (≈ 1.8 × optimal).
- The weighted‑matching algorithm produced the smallest covers (≈ 1.5 × optimal) but required roughly 30 % more messages than the greedy method, increasing energy use.
- The BFS‑tree algorithm achieved the best balance: an approximation ratio of about 1.3, a message count only slightly above the greedy approach, and overall energy consumption well within acceptable limits. Moreover, the algorithm proved robust to variations in root selection and level‑spacing parameters; the cover size remained stable across these changes.
The paper also discusses dynamic network conditions. In the event of node failures or new node arrivals, the greedy algorithm can quickly recompute local degrees, the matching algorithm can locally repair the matching, and the BFS‑tree method can rebuild the tree from the affected region, albeit with higher cost.
Conclusions.
The study provides a systematic comparison of three practical, distributed vertex‑cover constructions for WSNs, highlighting distinct trade‑offs among communication overhead, cover quality, and implementation complexity. Practitioners can select the greedy method when energy conservation is paramount, the matching method when a tighter cover is required despite higher messaging, or the BFS‑tree method when a balanced solution is desired. The work contributes both algorithmic insights and concrete implementation guidelines for deploying vertex‑cover based services in resource‑constrained sensor networks.