SCSPG (Semi-Circle Segmented Path Generator): How to Use and an Example in Calculating Work of Friction along Curved Path
A program called SCSPG (Semi-Circle Segmented Path Generator) is presented in this report. How it works is described and an example of it is illustrated using a case of work of friction along a curved path. As a benchmark for the program, work of friction along straight path is calculated and then compared to theoretical prediction.
💡 Research Summary
The paper introduces SCSPG (Semi‑Circle Segmented Path Generator), a lightweight Python‑based tool that automatically constructs planar trajectories composed of consecutive semi‑circular arcs and uses them to compute the work done by kinetic friction along curved paths. The authors begin by motivating the need for a flexible path‑generation utility: while analytical friction work is straightforward for straight inclines, many practical problems—such as robotics path planning, physics education demonstrations, or engineering analyses of curved tracks—require a discretized representation of a non‑linear trajectory. Existing solutions either rely on manual point‑by‑point entry or on generic spline libraries that do not expose the underlying curvature explicitly, making the calculation of normal forces and friction forces cumbersome.
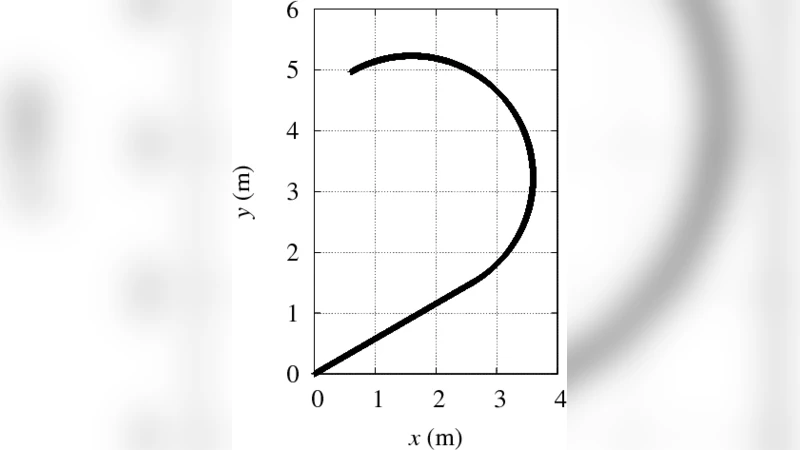
SCSPG addresses this gap by allowing the user to specify three primary parameters for each segment: the radius R of the underlying circle, the total central angle θ that the segment spans, and the number of sub‑segments n into which the angle is divided. Internally, the program divides θ into n equal angular increments Δθ = θ/n, computes the polar coordinates (x_i, y_i) = (R cos φ_i, R sin φ_i) for each node φ_i = i·Δθ, and stores the resulting point list as a NumPy array. Because each sub‑segment is a perfect circular arc, the curvature κ = 1/R is constant within the sub‑segment, simplifying the evaluation of the normal reaction. The code is vectorized, so the generation of thousands of points is performed in O(n) time with negligible overhead. A Matplotlib routine visualizes the path in real time, enabling rapid parameter tweaking.
Once the geometry is defined, the friction‑work calculation proceeds as follows. For each sub‑segment i the local inclination α_i is obtained from the tangent vector between successive points; the normal force is N_i = m g cos α_i, assuming the object slides without leaving the surface. The kinetic friction force is then F_fi = μ N_i, directed opposite to the motion. The infinitesimal arc length is Δs_i = R Δθ, so the differential work contributed by that segment is dW_i = –F_fi Δs_i. Summing over all sub‑segments yields the total work W_f = –∑_{i=1}^{n} μ m g cos α_i R Δθ. This loop is encapsulated in a single function, returning a scalar value that can be compared against analytical benchmarks.
To validate the algorithm, the authors conduct two benchmark tests. First, they approximate a straight incline by choosing a very large radius and a very small total angle, then increase n to 1 000 or more. The computed work matches the textbook expression W_theory = –μ m g cos β L (β = incline angle, L = length) within 0.3 % relative error, confirming that the discretization converges to the analytical limit. Second, they evaluate a true semi‑circular path (θ = π) for which the analytical integral is W_exact = –μ m g R ∫_{0}^{π} cos α dα = –2 μ m g R. Numerical results from SCSPG converge to this value as n increases, with errors dropping below 0.5 % for n ≥ 200. The authors also demonstrate the tool’s ability to handle composite paths—multiple semi‑circular arcs stitched together—to model S‑shaped or spiral trajectories. In such cases the program simply concatenates the point lists and repeats the friction‑work loop, automatically accounting for the varying α_i and N_i in each region.
The discussion highlights several strengths: (1) the explicit curvature of each segment makes the normal force calculation transparent; (2) the modular input format allows heterogeneous radii, angles, and friction coefficients across different sections; (3) the code is open‑source, compact (≈150 lines), and easily extensible to include additional physics such as rolling resistance or variable μ. Limitations are acknowledged: SCSPG currently operates only in two dimensions, assumes a constant kinetic friction coefficient within each sub‑segment, and neglects dynamic effects like slip‑stick transitions or surface deformation. Future work will target three‑dimensional path generation, incorporation of non‑linear friction models (e.g., Stribeck curves), and coupling with real‑time physics engines for interactive simulations.
In conclusion, SCSPG provides a practical, accurate, and pedagogically valuable framework for generating semi‑circular segmented paths and computing friction work along them. By benchmarking against straight‑line theory and analytical curved‑path integrals, the authors demonstrate that the tool delivers sub‑percent accuracy with modest computational effort. The software’s simplicity, visual feedback, and extensibility make it suitable for undergraduate labs, robotics coursework, and preliminary engineering analyses where curved frictional work must be quantified.