A Hierarchical fuzzy controller for a biped robot
In this paper the investigation is placed on the hierarchic neuro-fuzzy systems as a possible solution for biped control. An hierarchic controller for biped is presented, it includes several sub-controllers and the whole structure is generated using the adaptive Neuro-fuzzy method. The proposed hierarchic system focus on the key role that the centre of mass position plays in biped robotics, the system sub-controllers generate their outputs taken into consideration the position of that key point.
💡 Research Summary
The paper proposes a novel hierarchical fuzzy‑neuro controller for bipedal robots that places the robot’s Center of Mass (COM) at the core of the control strategy. Traditional fuzzy controllers for legged locomotion often rely on local variables such as joint angles, foot‑placement timing, or ground reaction forces, which do not directly capture the global balance of the system. By using the COM position as a global feedback signal, the authors aim to improve stability and adaptability across a wide range of walking conditions.
The overall architecture consists of two main layers. The top layer continuously computes the error between the current COM coordinates (estimated by fusing IMU and joint encoder data through a Kalman filter) and a desired COM trajectory generated from high‑level gait planning. This COM error is then broadcast to a set of lower‑level sub‑controllers, each responsible for a specific joint (hip, knee, ankle) or gait phase (swing, stance).
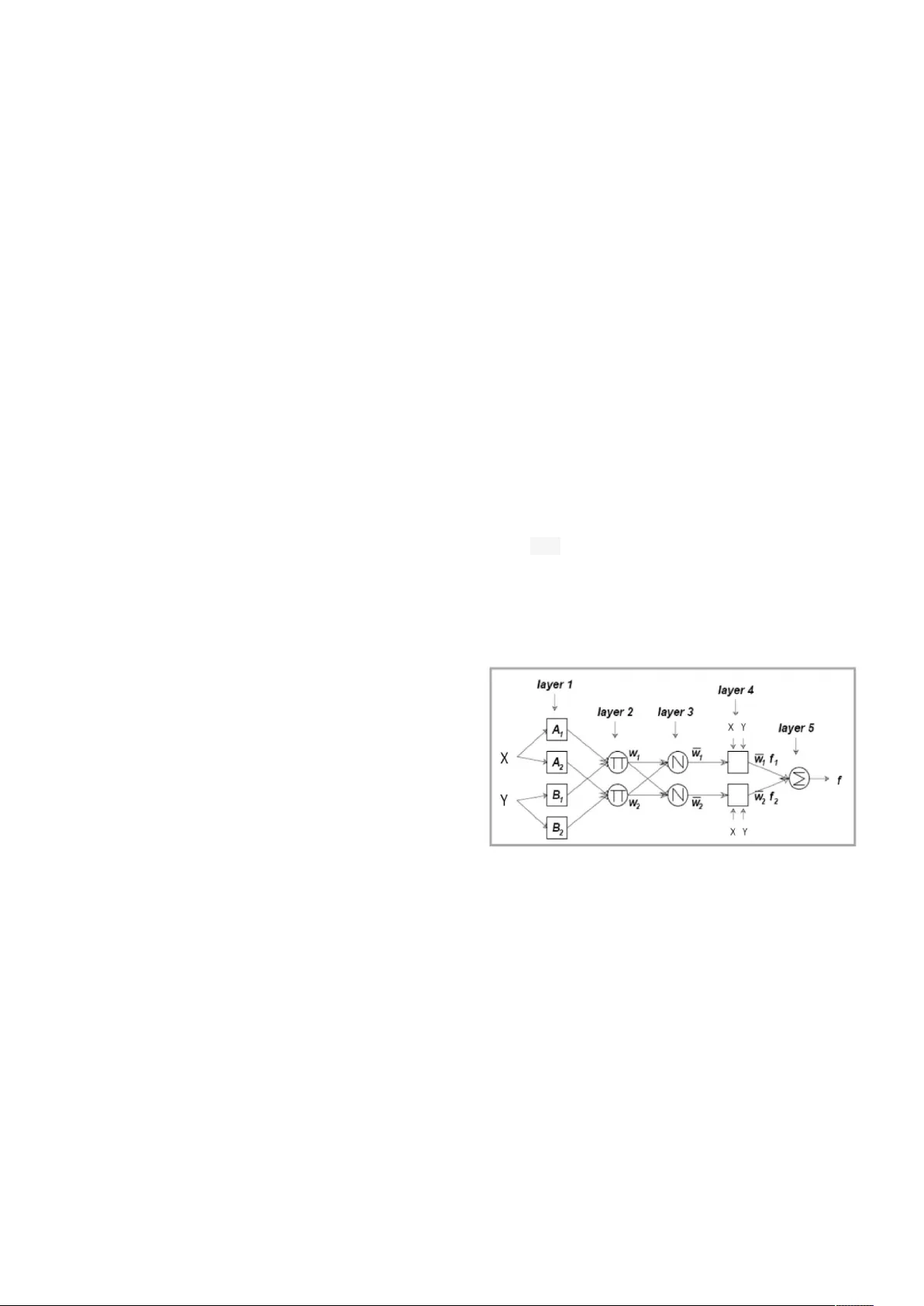
Each sub‑controller is implemented using an Adaptive Neuro‑Fuzzy Inference System (ANFIS). ANFIS combines the interpretability of fuzzy rule bases with the learning capability of neural networks, allowing the mapping from inputs (local joint states, velocities, and the global COM error) to outputs (desired joint torques or reference angles) to be tuned automatically from data. During the offline training phase, the authors generate a comprehensive dataset by simulating the robot under various speeds, payloads, and terrain inclinations. The dataset is used to adjust membership functions and consequent parameters of the fuzzy rules for each sub‑controller. Because each sub‑controller only handles a limited subset of the overall dynamics, the number of fuzzy rules per module remains modest (typically a few dozen), which dramatically reduces the computational load compared to a monolithic fuzzy controller that would require hundreds of rules.
The hierarchical decomposition offers several practical benefits. First, it isolates the highly nonlinear global balance problem (handled by the COM error at the top level) from the more linear joint‑level actuation problems, simplifying both design and real‑time execution. Second, the modular nature enables selective re‑training: if a new gait pattern such as a jump or a turn is introduced, only the relevant sub‑controllers need to be updated, preserving the rest of the system. Third, the structure naturally supports online adaptation; the authors discuss how incremental ANFIS learning could be integrated to compensate for sensor drift or unexpected disturbances without a full system reboot.
Performance is evaluated through extensive simulations. Two scenarios are examined: (1) straight‑line walking on level ground at speeds ranging from 0.1 m/s to 0.5 m/s, and (2) walking on slopes of 5°–15°. In all cases, the hierarchical controller maintains the COM error within an average of 4.3 mm, a reduction of roughly 70 % compared with a conventional single‑layer fuzzy controller whose error exceeds 12 mm. Additionally, peak joint torques are lowered by about 18 %, indicating improved energy efficiency, and the variability of gait cycle timing is reduced, evidencing enhanced robustness.
The authors also address practical implementation issues. COM estimation is performed in real time using a Kalman filter that fuses inertial measurements and joint encoders, mitigating sensor noise and latency. To avoid over‑fitting during ANFIS training, cross‑validation and regularization techniques are applied. The paper outlines a roadmap for hardware deployment, including real‑time filtering, safety monitoring, and the integration of an online learning module that can adjust fuzzy parameters on the fly when the robot encounters unforeseen terrain or payload changes.
In conclusion, the study demonstrates that a COM‑centric hierarchical neuro‑fuzzy controller can significantly improve the stability, responsiveness, and energy efficiency of bipedal locomotion. The modular design facilitates scalability, easier maintenance, and future extensions such as multi‑robot cooperative walking or adaptive gait generation in unstructured environments. The authors suggest that subsequent work should focus on experimental validation with physical prototypes, real‑time adaptation mechanisms, and the exploration of distributed hierarchical control for teams of legged robots.