Stabilization of Networked Control Systems with Sparse Observer-Controller Networks
In this paper we provide a set of stability conditions for linear time-invariant networked control systems with arbitrary topology, using a Lyapunov direct approach. We then use these stability conditions to provide a novel low-complexity algorithm for the design of a sparse observer-based control network. We employ distributed observers by employing the output of other nodes to improve the stability of each observer dynamics. To avoid unbounded growth of controller and observer gains, we impose bounds on their norms. The effects of relaxation of these bounds is discussed when trying to find the complete decentralization conditions.
💡 Research Summary
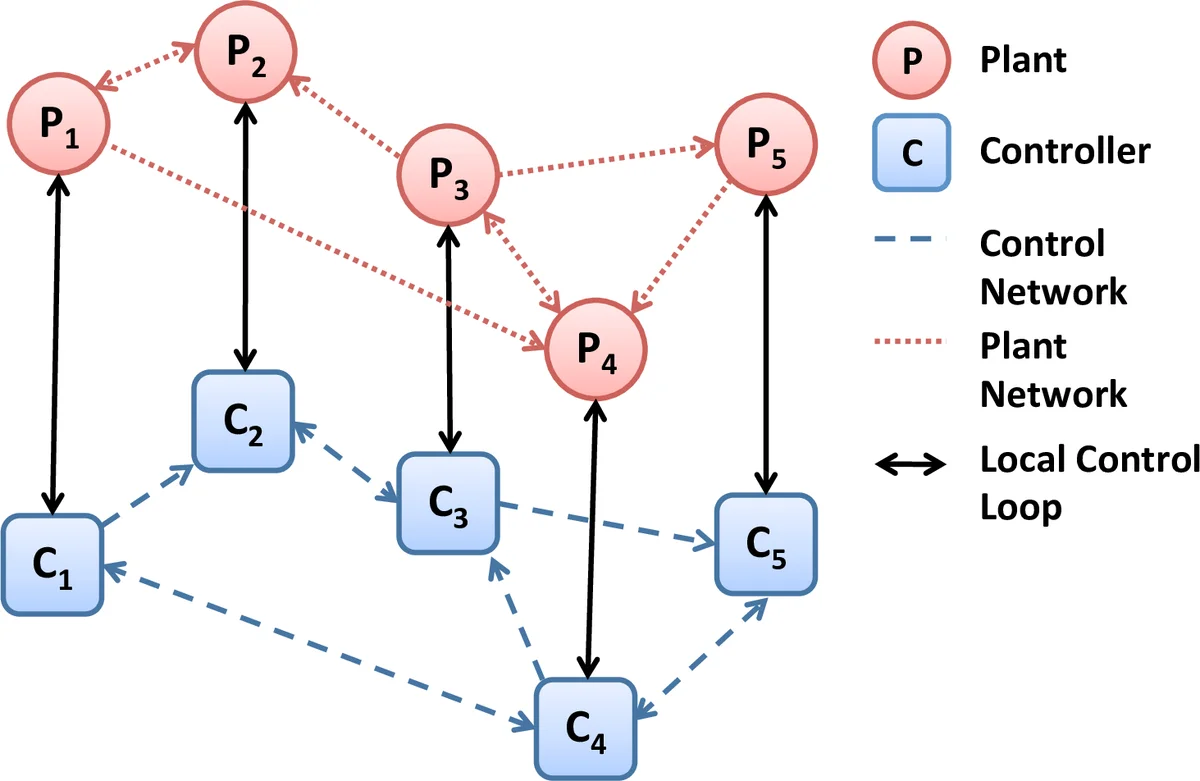
This paper addresses the problem of stabilizing linear time-invariant networked control systems (NCS) with arbitrary interconnections by designing a sparse observer-controller network. The core challenge lies in ensuring global asymptotic stability while minimizing the number of communication links in the control network, which carries state estimates and control signals between subsystems.
The authors begin by modeling an NCS comprising N coupled subsystems. The control strategy employs distributed observer-based controllers at each node. Each controller uses not only its own local state estimate but also the estimates from neighboring nodes (via gains L_ij), and each observer utilizes not only its local output but also outputs from other nodes (via gains O_ij) to improve estimation accuracy. Constraints on the norms of all gain matrices (K_i, M_i, L_ij, O_ij) are imposed to prevent impractical, excessively large gains.
The primary theoretical contribution is Lemma 1, which establishes sufficient conditions for global asymptotic stability of the resulting closed-loop system using a Lyapunov direct method. The conditions are expressed as two matrix inequalities involving diagonal Lyapunov matrices, ensuring input-to-state stability of the state dynamics and asymptotic stability of the estimation error dynamics, which are in a cascade form.
The main design contribution is formulated as an optimization problem: minimize the number of non-zero coupling gains (L_ij, O_ij) subject to the stability conditions and the gain norm constraints. Since the original problem is non-convex and integer-valued, Theorem 1 presents a critical reformulation. Through a change of variables and convex relaxations of the norm constraints, the problem is transformed into a convex mixed-binary semidefinite program (MISDP). Binary variables α_ij indicate the presence or absence of a communication link from node j to node i. Solving this MISDP yields the optimal sparse communication topology and the corresponding controller/observer gains.
Furthermore, the paper investigates the conditions under which complete decentralization (i.e., no communication links: L_ij=0, O_ij=0) is feasible. Theorems 2 and 3 provide insights into this. They show that if the norms of the plant coupling matrix H are sufficiently small relative to solutions of Algebraic Riccati Equations, and if the allowed local gain norms (κ_i, μ_i) are large enough, then decentralized control can stabilize the network. A convex optimization problem is provided to find the required local gains in such cases.
In summary, this work provides a comprehensive framework for the co-design of sparse communication networks and distributed observer-based controllers for general NCS topologies. It balances theoretical rigor (guaranteed stability) with practical design objectives (sparsity and bounded gains), and also delineates the theoretical limits of fully decentralized control.
Comments & Academic Discussion
Loading comments...
Leave a Comment