Pedestrian Route Choice by Iterated Equilibrium Search
In vehicular traffic planning it is a long standing problem how to assign demand such on the available model of a road network that an equilibrium with regard to travel time or generalized costs is realized. For pedestrian traffic this question can be asked as well. However, as the infrastructure of pedestrian dynamics is not a network (a graph), but two-dimensional, there is in principle an infinitely large set of routes. As a consequence none of the iterating assignment methods developed for road traffic can be applied for pedestrians. In this contribution a method to overcome this problem is briefly summarized and applied with an example geometry which as a result is enhanced with routes with intermediate destination areas of certain shape. The enhanced geometry is used in some exemplary assignment calculations.
💡 Research Summary
The paper addresses a fundamental challenge in pedestrian traffic modelling: unlike vehicular traffic, pedestrian movement occurs in a continuous two‑dimensional space, which means the set of possible routes is effectively infinite. Traditional traffic assignment methods rely on a pre‑defined, finite set of paths and iteratively adjust route‑choice proportions until a user equilibrium (UE) or system optimum (SO) is reached. To make such methods applicable to pedestrians, the authors first propose a rigorous definition of a “route”: two trajectories are considered distinct only if they cannot be continuously deformed into one another without crossing an obstacle of at least a configurable minimum size. Using this definition, they automatically generate a finite set of routes by inserting intermediate destination areas (IDAs). Each IDA is constructed along an iso‑distance contour to the next downstream IDA, guaranteeing that pedestrians approach it orthogonally and that no artificial sharp turns or bottlenecks are introduced locally.
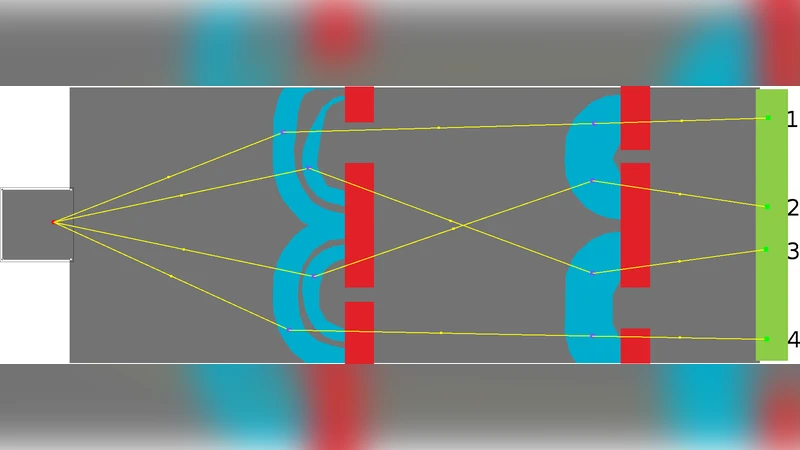
The methodology is demonstrated on a simple geometry consisting of a start area, a destination area, and two successive bottlenecks (doors of different widths). The automatic procedure yields four distinct routes, each characterized by a different sequence of wide and narrow doors. Pedestrian dynamics are simulated with PTV Viswalk, which implements a Social Force model (circular and elliptical specifications). Pedestrians are assigned a desired speed and head toward the spatially shortest path to the next IDA; deviations arise only from interpersonal forces.
Route‑choice proportions are updated through a straightforward iterative assignment scheme. In the first iteration, each of the four routes receives 25 % of the pedestrians. After a simulation run, the average travel time (t_i) for each route is measured for all agents that reach the destination between 300 s and 600 s. The route with the smallest average travel time (t_{\min}) has its proportion increased, while the route with the largest average travel time (t_{\max}) has its proportion decreased by the same amount (\Delta p), computed as
\
Comments & Academic Discussion
Loading comments...
Leave a Comment