Expanding the Knowledge Horizon in Underwater Robot Swarms
In this paper we study the time delays affecting the diffusion of information in an underwater heterogeneous robot swarm, considering a time-sensitive environment. In many situations each member of the swarm must update its knowledge about the environment as soon as possible, thus every effort to expand the knowledge horizon is useful. Otherwise critical information may not reach nodes far from the source causing dangerous misbehaviour of the swarm. We consider two extreme situations. In the first scenario we have an unique probabilistic delay distribution. In the second scenario, each agent is subject to a different truncated gaussian distribution, meaning local conditions are significantly different from link to link. We study how several swarm topologies react to the two scenarios and how to allocate the more efficient transmission resources in order to expand the horizon. Results show that significant time savings under a gossip-like protocol are possible properly allocating the resources. Moreover, methods to determine the fastest swarm topologies and the most important nodes are suggested.
💡 Research Summary
The paper investigates how communication delays affect the diffusion of information in heterogeneous underwater robot swarms, a critical issue when timely knowledge of the environment is required. Two extreme stochastic delay models are considered: (1) a single uniform distribution applied to all links (Scenario I) and (2) a distinct truncated Gaussian distribution for each link (Scenario II), reflecting the highly variable acoustic channel conditions (temperature, salinity, turbidity, depth, etc.). The authors evaluate five canonical swarm topologies—Erdős‑Rényi (random), Small‑World, Grid, Cluster (rings), and Galaxy (star‑clusters)—each built with 100 nodes and 140 edges, yielding an average degree of 2.8. To keep the comparison fair, edges are added or removed so that all graphs have the same size and similar baseline broadcast delay (±0.2 s).
Information spread follows a gossip‑like (epidemic) protocol: a single source node initiates a 256‑byte warning message, each node contacts its one‑hop neighbours in numerical order, and transmission attempts succeed only if the acoustic link is “on” and the stochastic delay (including MAC overhead) expires. No further processing is performed on the payload, making the delay the sole quality‑of‑service metric.
The core contribution is a resource‑allocation study that assigns a high‑quality acoustic transceiver to a selected subset of nodes, thereby reducing the outgoing link delays from those nodes. Four node‑selection strategies are examined: (i) Degree Centrality (nodes with the highest number of neighbours), (ii) Betweenness Centrality (nodes that lie on many shortest paths), (iii) AV11 – a spectral combinatorial algorithm that chooses a set of k nodes simultaneously, and (iv) Random selection as a baseline. After selecting the “hub” nodes, the simulation reduces the associated link delays and measures the overall diffusion time.
Spectral graph theory is used to predict which topologies will benefit most from optimization. For each graph the authors compute: (a) the maximum eigenvalue of the adjacency matrix (λ_max), (b) the spectral gap of the Laplacian (λ_{n‑1}‑λ_n), and (c) the algebraic connectivity (λ_2). These metrics are linked to the consensus stability condition of Olfati‑Saber (τ ≤ π/(2λ_max)), highlighting a trade‑off: a larger λ_max yields higher connectivity but makes the network more sensitive to large delays.
Key Findings
- Baseline Delays – Across both scenarios the average diffusion times differ only slightly among topologies (≈23–26 s), confirming that the raw graph structure does not dominate delay when all links have identical statistical properties.
- Impact of Optimization – When high‑quality transceivers are placed on selected nodes, the relative reduction in diffusion time varies dramatically with topology and selection method.
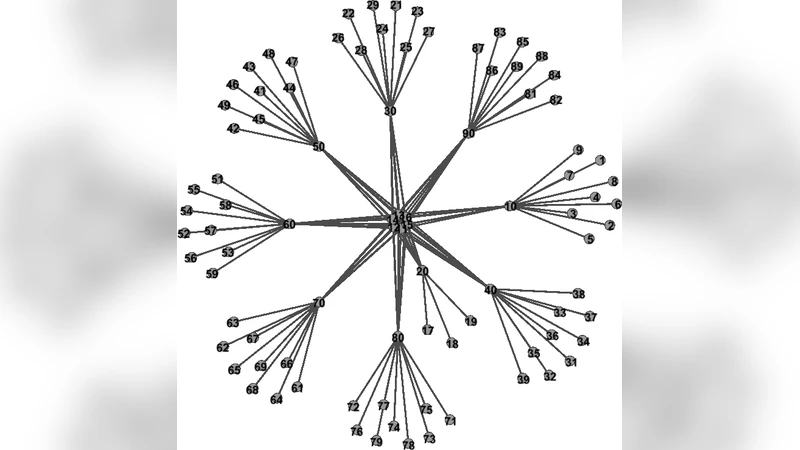
- The Galaxy (star‑cluster) topology consistently yields the largest savings, up to ~39 % in Scenario II when AV11 is used, and ~31 % with simple degree‑based selection. The central star acts as a powerful hub, rapidly broadcasting to all peripheral nodes.
- For Grid and Cluster topologies, AV11 outperforms simple degree centrality, delivering 5–7 % additional delay reduction. These structures have multiple alternative paths, so a spectral‑based multi‑node selection captures more of the network’s redundancy.
- In Erdős‑Rényi and Small‑World graphs, degree centrality is already near‑optimal; AV11 provides only marginal gains.
- Spectral Correlation – Graphs with higher λ_max and larger spectral gaps tend to exhibit larger post‑optimization improvements, confirming that strong overall connectivity amplifies the benefit of targeted high‑quality links. Algebraic connectivity (λ_2) alone does not reliably distinguish performance, as seen in the Grid vs. Small‑World comparison.
- Practical Considerations – While the Galaxy topology offers the best theoretical performance, its reliance on a single central node raises energy‑consumption concerns. The authors suggest rotating the central role among multiple AUVs or employing frequency‑coding to mitigate overload. Conversely, the Erdős‑Rényi topology provides a robust, easy‑to‑implement alternative with respectable gains.
Methodological Contributions
- The paper demonstrates how to embed heterogeneous delay models into a Markov‑chain based simulation of gossip spreading, accounting for link‑on/off stochasticity and MAC‑induced latency.
- It integrates spectral graph metrics with centrality‑based resource allocation, offering a systematic way to predict which nodes should receive premium communication hardware.
- By comparing a simple heuristic (degree) with a more sophisticated spectral optimizer (AV11), the study quantifies the trade‑off between algorithmic complexity and performance gain in realistic swarm sizes (< 200 robots).
Conclusions and Future Work
The authors conclude that expanding the knowledge horizon of underwater robot swarms hinges on three pillars: (1) accurate stochastic modeling of link delays, (2) selection of a topology with favorable spectral properties, and (3) application of centrality‑aware resource allocation tailored to the chosen topology. In heterogeneous environments, AV11‑type spectral selection can unlock additional performance in structured graphs, whereas in random or star‑like graphs simple degree‑based selection suffices. Future research directions include extending the model to dynamic topologies (nodes moving relative to each other), incorporating energy‑aware scheduling for the central hub, and validating the findings with field experiments using acoustic‑optical hybrid modems.
Comments & Academic Discussion
Loading comments...
Leave a Comment