The motion of the 2D hydrodynamic Chaplygin sleigh in the presence of circulation
We consider the motion of a planar rigid body in a potential flow with circulation and subject to a certain nonholonomic constraint. This model is related to the design of underwater vehicles. The equations of motion admit a reduction to a 2-dimensional nonlinear system, which is integrated explicitly. We show that the reduced system comprises both asymptotic and periodic dynamics separated by a critical value of the energy, and give a complete classification of types of the motion. Then we describe the whole variety of the trajectories of the body on the plane.
💡 Research Summary
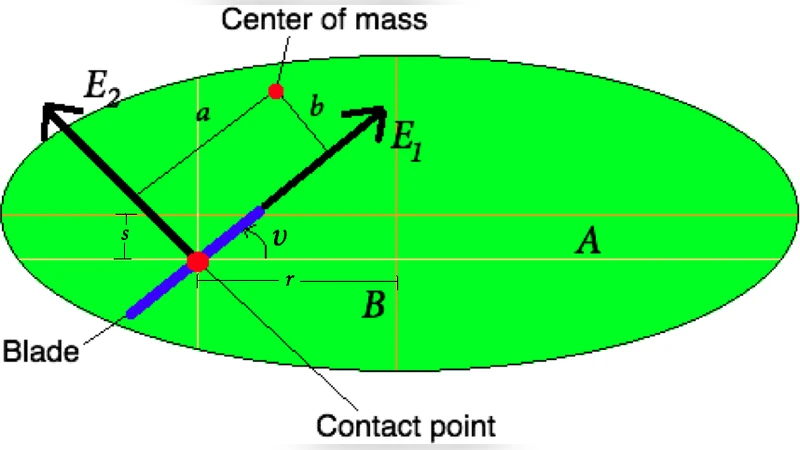
The paper investigates the dynamics of a planar rigid body—known as the Chaplygin sleight—moving in an ideal (potential) fluid that carries a prescribed circulation. In addition to the usual non‑holonomic constraint that prevents motion in a certain body‑fixed direction (the “blade” constraint), the authors incorporate a constant circulation Γ around the body. This setting is motivated by underwater vehicle design, where circulation can be generated deliberately (e.g., by a rotating fin) or may arise unintentionally, and where non‑holonomic constraints model thrust‑direction limits or control‑surface restrictions.
The authors begin by formulating the fluid‑body interaction using classical added‑mass theory. The fluid’s kinetic energy is expressed through a virtual mass matrix that depends on the body’s geometry; the circulation contributes an extra term proportional to Γ and to the body’s angular velocity. The total Lagrangian therefore consists of the rigid‑body kinetic energy, the added‑mass kinetic energy, and the circulation‑induced coupling. The non‑holonomic constraint is introduced via a Lagrange multiplier λ, leading to the Lagrange‑d’Alembert equations.
By exploiting the symmetry of the problem (the fluid is irrotational except for the prescribed circulation) the equations reduce to a two‑dimensional autonomous system for the linear velocity u (along the constrained direction) and the angular velocity ω. The reduced system can be written as
\dot u = f(u, ω), \dot ω = g(u, ω),
with a first integral that plays the role of a modified energy
E = ½ (M_eff u² + I_eff ω²) + Γ C ω,
where M_eff and I_eff are effective mass and inertia (including added‑mass effects) and C is a geometric constant. Because of the non‑holonomic constraint the system is not Hamiltonian, but the existence of E allows a phase‑plane analysis.
A crucial finding is the presence of a critical energy level
E_c = Γ² / (2 I_eff) (up to geometric factors),
which separates two qualitatively different regimes. For E < E_c the phase portrait contains a single stable equilibrium (u*, ω*) toward which all trajectories converge; physically the sleight drifts in a straight line, gradually losing speed, and eventually comes to rest. For E > E_c the equilibrium becomes unstable and a closed limit cycle appears. Trajectories on this cycle correspond to perpetual periodic motion: the body follows a bounded, typically elliptical or circular, orbit while rotating at a constant average rate. The sign of Γ determines the sense of rotation, breaking the left‑right symmetry present in the classical (Γ = 0) Chaplygin sleight.
The authors obtain explicit analytic solutions by performing a change of variables that linearises the first integral, integrating the resulting separable equations. The solutions involve elementary logarithmic and arctangent functions, providing closed‑form expressions for u(t) and ω(t). By further integrating the kinematic relations
\dot x = u cos θ – ω y, \dot y = u sin θ + ω x,
they reconstruct the trajectory (x(t), y(t)) of the body’s center of mass on the plane. The paper presents several representative plots: (i) straight‑line convergence for low energy, (ii) closed elliptical loops for high energy, (iii) asymmetric spirals when Γ ≠ 0 and the initial conditions place the system on the unstable manifold of the equilibrium, and (iv) mixed motions where the trajectory first approaches the equilibrium and then jumps onto the limit cycle.
Beyond the mathematical classification, the authors discuss engineering implications. The existence of a controllable energy threshold suggests a method for switching between “survey” mode (periodic closed paths useful for area coverage) and “transit” mode (straight‑line motion for rapid relocation) simply by adjusting the circulation strength (e.g., by varying fin rotation speed). Moreover, the non‑holonomic constraint can be interpreted as a thrust‑direction limitation; the analysis shows how such constraints interact with circulation‑induced gyroscopic forces, potentially improving maneuverability without additional actuators.
In conclusion, the paper delivers a complete analytical treatment of the Chaplygin sleight in a circulating potential flow, identifies a clear bifurcation at a critical energy, and classifies all possible planar trajectories. The results enrich the theoretical toolbox for underwater vehicle designers and open avenues for experimental validation and extension to three‑dimensional bodies or viscous flows.