Analysis of stochastic time series in the presence of strong measurement noise
A new approach for the analysis of Langevin-type stochastic processes in the presence of strong measurement noise is presented. For the case of Gaussian distributed, exponentially correlated, measurement noise it is possible to extract the strength and the correlation time of the noise as well as polynomial approximations of the drift and diffusion functions from the underlying Langevin equation.
💡 Research Summary
The paper addresses a fundamental problem in the analysis of stochastic time series: how to recover the underlying dynamics when the measured data are heavily contaminated by measurement noise that is both strong and temporally correlated. Traditional approaches based on the Kramers‑Moyal expansion and conditional moments assume either negligible noise or white (uncorrelated) noise. Under those assumptions, the first and second conditional moments of the observed series can be directly related to the drift and diffusion coefficients of the underlying Langevin equation. However, when the measurement noise has a finite correlation time and a variance comparable to or larger than the signal, these simple relations break down, leading to biased estimates of the drift D⁽¹⁾(x) and diffusion D⁽²⁾(x) functions.
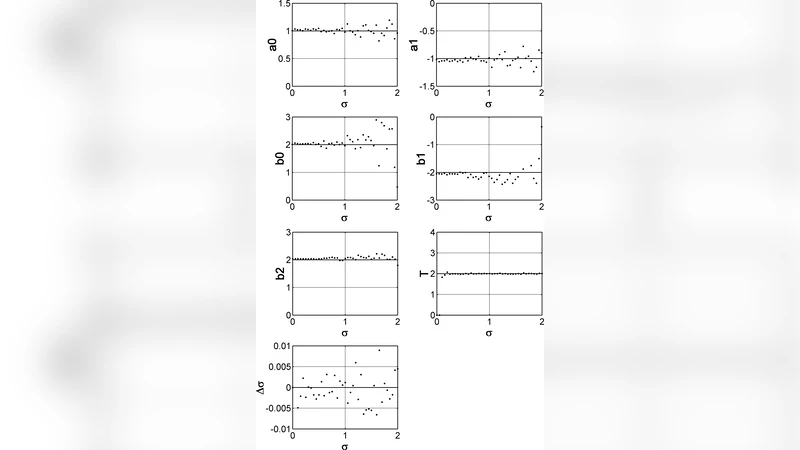
The authors model the measurement noise η(t) as a Gaussian Ornstein‑Uhlenbeck process with zero mean, variance σ², and exponential autocorrelation Cη(τ)=σ² exp(−|τ|/τc). The observed series is x(t)=y(t)+η(t), where y(t) follows a Langevin equation dy/dt = D⁽¹⁾(y) + √{2 D⁽²⁾(y)} ξ(t) with ξ(t) being white Gaussian noise. By expanding the observable conditional moments M̃⁽¹⁾(x,Δt) and M̃⁽²⁾(x,Δt) for small time increments Δt, the authors derive the following approximations:
M̃⁽¹⁾(x,Δt) = D⁽¹⁾(x) Δt + O(Δt²)
M̃⁽²⁾(x,Δt) = 2 D⁽²⁾(x) Δt + σ²
Comments & Academic Discussion
Loading comments...
Leave a Comment